简单而有效的力学隐形
本文翻译自:S. M. Fielding, “Simple and effective mechanical cloaking” Journal of the Mechanics and Physics of Solids, vol. 192, p. 105824, Nov. 2024. doi: 10.1016/j.jmps.2024.105824.
摘要
我们从理论上证明,通过一个由三个同心圆环组成的简单 cloak(隐身衣),可以在均匀周围介质中对圆形夹杂实现近乎完美的弹性静力隐身。该 cloak 的每个圆环均由具有指定剪切模量的均匀、各向同性线弹性材料构成。重要的是,我们发现,对于任意随机混合的压缩、纯剪切和简单剪切所施加的变形或加载模式,同一组圆环组合都能实现隐身效果,无需针对不同的变形模式重新设计。从软到硬的各种圆形夹杂均可通过此方式被隐身。因此,我们建议,任何任意形状的夹杂也可以通过首先将其包裹在一个硬质圆中,然后用所述的三圆环 cloak 对组合结构进行隐身来实现。鉴于单个夹杂可以通过这种方式在靠近隐身边界附近的近场实现完全隐身,那么以任意高堆积分数排列在周围介质中的多个这样的中性夹杂也可以被隐身。我们通过直接模拟证实了这一点。这表明了一条可能的途径,用于制造具有与均质对照材料相同整体力学响应,且在隐身夹杂外部具有均匀应力应变场的复合材料。
引言
隐身是通过将夹杂包裹在“斗篷”中,使其在某种物理特性上与周围介质不同,从而降低其可见性的技术。其广泛的潜在应用包括光学隐身(Pendry et al., 2006; Leonhardt, 2006)、电磁场隔离(Wood and Pendry, 2007; Zhu et al., 2015; Gömöry et al., 2012)、声学降噪(Norris, 2008; Cummer and Schurig, 2007; Chen and Chan, 2007)、流体力学中的减阻(Park et al., 2019)、热防护(Xu et al., 2014)、质量屏蔽(Guenneau and Puvirajesinghe, 2013)、弹性动力学振动的缓解(Brun et al., 2009; Nassar et al., 2019; Norris and Parnell, 2012; Farhat et al., 2009; Zhang et al., 2020),包括地震防护(Brûlé et al., 2017),以及本研究的重点——弹性介质中夹杂的静弹性隐身,以实现力学“不可感知性”。
过去二十年,隐身技术取得了快速进展,近期已有综述(Martinez and Maldovan, 2022)。在电磁学领域(Pendry et al., 2006; Leonhardt, 2006),控制场方程在变换下的不变性被用于通过共形映射设计合适的各向异性非均匀折射率,从而实现隐身。然而,在弹性理论中,控制方程并非不变的(Yavari and Golgoon, 2019):变换通常会导致各向异性密度以及应变与动量之间的耦合(Milton et al., 2006)。尽管如此,仍取得了一些成功,例如通过空间变化的秩四弹性张量实现弹性动力学波的隐身(Brun et al., 2009)、预应力下的超弹性材料(Norris and Parnell, 2012)或非对称超材料(Zhang et al., 2020)。薄板中的弯曲波也已成功实现隐身(Farhat et al., 2009)。
在静弹性隐身的背景下,其基本目标是使弹性介质中的夹杂在力学上“不可感知”,即被隐身夹杂外部的变形、应变和应力场与无夹杂的等效均匀介质中的场完全相同。继Eshelby关于夹杂的开创性工作之后(Eshelby, 1957),寻找中性夹杂已有很长历史(Mansfield, 1953; Christensen and Lo, 1979; Sozio et al., 2023),但往往涉及复杂的不完善界面(Bertoldi et al., 2007; Bigoni et al., 1998; He, 2002; Ru, 1998; Wang and Schiavone, 2012)、各向异性材料(Benveniste et al., 1991; Hashin, 1990; Norris et al., 2020)、精确调整材料的剪切模量和泊松比(Wang and Schiavone, 2023a,b),或仅考虑反平面弹性(Milton and Serkov, 2001)或纯压缩变形而无剪切(Kang, 2016)。实际上,静弹性隐身的进展显著落后于其他领域,部分原因是上述变换方法的失效。尽管如此,最近通过五模超材料(Bückmann et al., 2014)、直接晶格变换(Bückmann et al., 2015)、可变形孔洞(Cheng et al., 2023)、形状优化(Fachinotti et al., 2018)、拓扑优化(Ota and Fujii, 2022)、基于晶格的超材料(Sanders et al., 2021)和数据驱动的非周期超材料设计(Wang et al., 2022)取得了一些成功。
然而,典型情况下,此类策略涉及复杂的超材料隐身结构,包含数百或数千个亚单元,需要计算密集的优化和具有挑战性的制备。此外,它们通常仅实现适度的隐身性能,以场扰动的度量量化,与均匀介质中的仿射场相比,这种扰动通常仅降低倍,在例外情况下降低倍。更重要的是,尽管此类斗篷可以优化以在特定的变形或加载模式(剪切、压缩,或两者的特定预设混合)下实现合理到良好的性能,但必须为每种变形或载荷的混合分别设计不同的斗篷。
在本研究中,我们通过解析计算和直接数值模拟(两者完全一致)表明,在空间维度中,圆形夹杂的基本完美力学隐身可以通过一个由三个同心圆环组成的简单斗篷实现,每个圆环由具有预设弹性模量的均匀各向同性线弹性材料构成,这在笔记本电脑上仅需几秒到几分钟即可计算完成。我们希望此类斗篷在实验上也相对容易制备。重要的是,我们表明相同的圆环组合可以隐身任何可能的变形和/或加载模式,包括任意选择的压缩、纯剪切和简单剪切的混合,无需为每种不同的混合设计不同的斗篷。我们证明,从软到硬的全范围圆形夹杂都可以通过这种方式隐身。这进一步表明,任何任意形状的夹杂也可以通过先将其包裹在刚性圆中,然后用上述三个圆环隐身组合结构来实现隐身。
我们方法的一个关键特征是,对于夹杂和周围材料的任何给定组合,只需调整隐身圆环中的剪切模量的值,对于任何一组圆环的泊松比。实际上,我们强调这些可以在调整之前任意选择(对于任何集),根据我们下面提出的方法。这与近期工作(Wang and Schiavone, 2023a,b)形成对比,在这些工作中,剪切模量和泊松比在斗篷的每个区域都必须精确预设。从实际制备设备的角度来看,这种区别尤为重要,因为几乎不可能精确预设任何组件材料的剪切模量和泊松比。
本文结构如下。第1节介绍隐身几何结构和控制方程。第2节揭示完美隐身的精确解析条件,然后在第3节通过直接数值模拟进行验证。我们在第4节提出结论性展望。
几何和控制方程
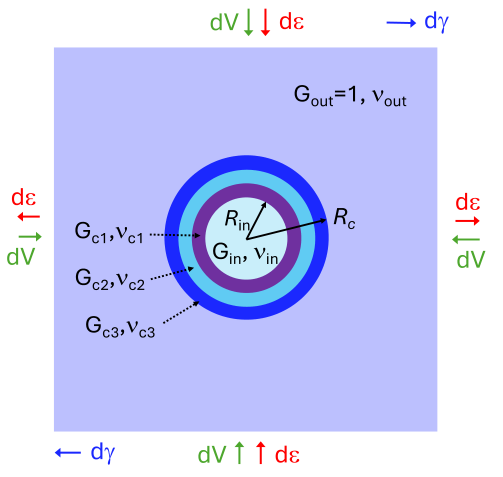
图1:在空间维度的线性各向同性弹性框架下,我们研究了一个半径为、弹性模量为的圆形夹杂,该夹杂位于弹性模量为的周围介质中,所受的施加变形包括体各向同性压缩、纯剪切和简单剪切的任意混合。我们的目标是用一个从内半径延伸到外半径的斗篷包裹该夹杂,该斗篷由一个、两个或三个弹性模量为的圆环组成,使得斗篷外的变形场与无夹杂均匀介质中所施加的仿射变形场相比不受扰动。
如图1所示,在空间维度的线性各向同性弹性框架下,我们考虑一个半径为、弹性模量为、泊松比为的圆形夹杂,其被一个从内半径延伸到外半径的斗篷包裹,周围介质的弹性模量为、泊松比为。在接下来的研究中,我们探索由一个、两个或三个圆环组成的斗篷,这些圆环的模量为、泊松比为。当存在两个或三个圆环时,我们假设任意斗篷中的所有圆环厚度均相等。
控制方程如下。作为空间的函数,我们定义应变场
其中是相对于未变形平衡状态的位移场。在线性各向同性弹性框架下,弹性应力场为
无惯性极限下的力平衡要求
在式(2)中,常数和是材料的拉梅系数,它们可以通过剪切模量和体积模量表示为
材料的泊松比为
在这五个常数和中,我们只需指定其中两个,因为其余三个可由式(4)和(5)确定。我们将以和为变量进行研究,注意在维度下,比值。
在第2节的解析计算中,远场处施加了均匀仿射变形场,该变形场包含体各向同性压缩(或膨胀,)、纯剪切和简单剪切的某种混合;在第3节的直接数值模拟中,该变形场在尺寸为的双周期盒内平均施加。我们使用大写字母表示变形场的仿射部分,与全场区分开,后者通常偏离仿射场并依赖于空间。
我们选择周围介质的模量作为应力单位。在接下来的大部分内容中,我们选择夹杂半径作为长度单位,除非在图5中,我们在同一个盒子中模拟多个夹杂。由于我们考虑的是静态隐身,因此不需要时间单位。
完美隐身的解析条件
在本节中,我们在线性各向同性弹性的框架下,推导了完美力学隐身的解析条件。我们假设夹杂、隐身圆环与周围介质之间的界面都是完全结合且锐利的。(在第3节的模拟中,每个界面会有一个由数值网格设定的小的非零厚度。这会对完美隐身产生一个小的修正,但随着逆线性网格密度的增加,这种修正会减小。)
我们的策略是,首先针对任意选定的一组圆环模量和泊松比(最初并非为了隐身而选定),求解夹杂、每个圆环以及周围介质中的变形场。这个解在周围介质中产生的变形场,通常会与均匀介质中的仿射场有所不同。然后,我们将这个未隐身的通用解作为跳板,研究圆环模量需要满足什么条件,才能消除斗篷外变形场的非仿射部分,从而实现完美隐身。
无隐身的一般解
弹性体的一般解
在以圆形夹杂为中心的柱极坐标下,变形场为
应变场(式(1))的分量形式为
以及应力场(式(2))为
这里我们回顾之前定义的比值 。
力平衡条件(式(3))可写为:
由 个圆环组成的斗篷系统包含 个均匀模量 和泊松比 的体区域:夹杂、 个隐身圆环,以及周围介质。将式(8)和(9)结合,得到在每个这样的均匀区域中控制变形场的两个方程:
在任意均匀体区域中,这些方程的解为
其中常数系数 ()和 ()在每个体区域中分别计算。在每个体区域中,该解需满足系数间的以下8个约束条件:
其中
因此,每个体区域中有12个未知系数:零角模态下的4个 , 模态下的4个 ,以及 模态下的4个 。在我们的 个体区域系统中,总共有 个系数。
但我们认识到,当 时变形场必须趋于零。这在夹杂中给出6个进一步的约束:。当 时,变形场必须趋于施加的仿射场。这在周围介质中给出6个进一步的约束:, , , , 和 。未知系数的数量减少到 。总而言之,在夹杂中,这些系数为 与 以及 ;在周围介质中,为 与 以及 ;而在每个 个圆环中,为 与 以及 。
边界条件
到目前为止,我们已经找到了用刚才列出的 个系数表示的体变形场的解。为了确定这些系数的值(给定夹杂 、圆环 以及周围介质 的弹性模量和泊松比的任意组合),我们现在考虑在 个界面上适用的条件,这些界面将夹杂与内隐身圆环、各个隐身圆环以及外隐身圆环与周围介质分隔开。
我们假设每个界面都是完全结合且锐利的,界面上的变形和牵引力是连续的:,其中 表示任意量 在界面上的跃变。对于半径为 的界面,这些条件为:
在我们的 个界面上,这4个约束中的每一个都必须分别应用于零角模态、 模态和 模态。这给出了 个线性方程,用于控制2.1.1节末尾列出的 个系数。这些方程可以在笔记本电脑上以 的时间数值求解。将计算得到的系数代入式(11),即可得到所有体区域(夹杂、每个隐身圆环和周围介质)中的变形场。
完美隐身的条件
在任何系统中,刚刚计算出的体变形场将取决于夹杂 和圆环 相对于周围介质 的弹性模量和泊松比。实际上,对于任意选定的 和 ,周围介质中的变形场通常会偏离在无夹杂的均匀介质中会得到的仿射场。这种偏差由系数 量化(其他系数 等通过式(15)指定)。因此,我们定义度量:
完美隐身将在周围介质中该度量被减小到零时实现,使得斗篷外的变形场简化为仿射场。
为了考虑如何实现这一点,首先认识到上一小节中的 个界面方程解耦为四个子系统是有帮助的:
(I) 零角模态下,界面条件(18)和(20)关于 和 给出 个线性方程,我们以广义矩阵形式 写出,在 个未知量 中,包括夹杂中的 、周围介质中的 以及每个圆环中的 。向量 只有一个非零项,等于周围介质中施加的剪切 。这对应于刚体转动,这是一个全局不变量,因此该子系统无需进一步考虑。实际上,上述提到的夹杂中 的条件自动确保周围介质中 。
(II) 零角模态下,界面条件(17)和(19)关于 和 给出 个方程 (重新定义上面的 和 ),在 个未知量 中,包括夹杂中的 、周围介质中的 以及每个圆环中的 。向量 只有一个非零项:周围介质中施加的体积压缩 。
(III) 模态下关于 和 的界面条件(17)和(19),以及 模态下关于 和 的界面条件(18)和(20),给出 个方程 (再次重新定义 和 ),在 个未知量 中,包括夹杂中的 、周围介质中的 以及每个圆环中的 。向量 只有一个非零项:周围介质中施加的纯剪切 。
(IV) 模态下关于 和 的界面条件(18)和(20),以及 模态下关于 和 的界面条件(17)和(19),在 个未知量 中给出 个方程 ,包括夹杂中的 、周围介质中的 以及每个圆环中的 。这里的矩阵 实际上与子系统(III)中的相同。同样,向量 只有一个非零项,位置与(III)相同,等于周围介质中施加的简单剪切 。实际上,任何简单剪切都可以表示为刚体转动和纯剪切的和。子系统(I)中已经考虑了转动。这里(IV)的分量是纯剪切。因此,子系统(III)和(IV)实际上是相同的:(III)描述了具有水平和垂直主轴线的纯剪切 ,而(IV)描述了具有对角主轴线的 的纯剪切分量。
总结:在任何一般施加的变形的三个分量中,压缩 由子系统(II)控制,而简单和纯剪切 和 由子系统(IV)=(III)控制。考虑到这一点,我们现在继续揭示完美力学隐身的解析条件。作为教学性的热身讨论,我们将首先在2.2.1节中单独考虑压缩隐身,然后(分别)在2.2.2节中单独考虑剪切。最后,在2.2.3节中,我们将考虑主要感兴趣的问题:任意压缩、纯剪切和简单剪切混合的隐身。
为了明确和简单,我们将首先进行数值计算以确认这些解析预测,最初假设整个结构(包括夹杂、所有隐身圆环和周围材料)的泊松比 均匀。实际上,我们考虑了广泛的 值,从常规材料到拉胀材料。然而,我们强调,我们的解析方法不依赖于泊松比在整个装置中是否均匀,甚至(例如)在每个隐身圆环中是否不同但精确调整。如上所述,从实验制备装置的角度来看,这一点很重要,因为在实践中几乎不可能精确规定任何给定材料组件的剪切模量和泊松比。然后,我们将在第4节中返回进行数值计算,确认对于任何给定的夹杂和周围材料,隐身环的泊松比可以基本上任意选择,只需在给定任意选定的泊松比集的情况下,精确规定隐身环的剪切模量。
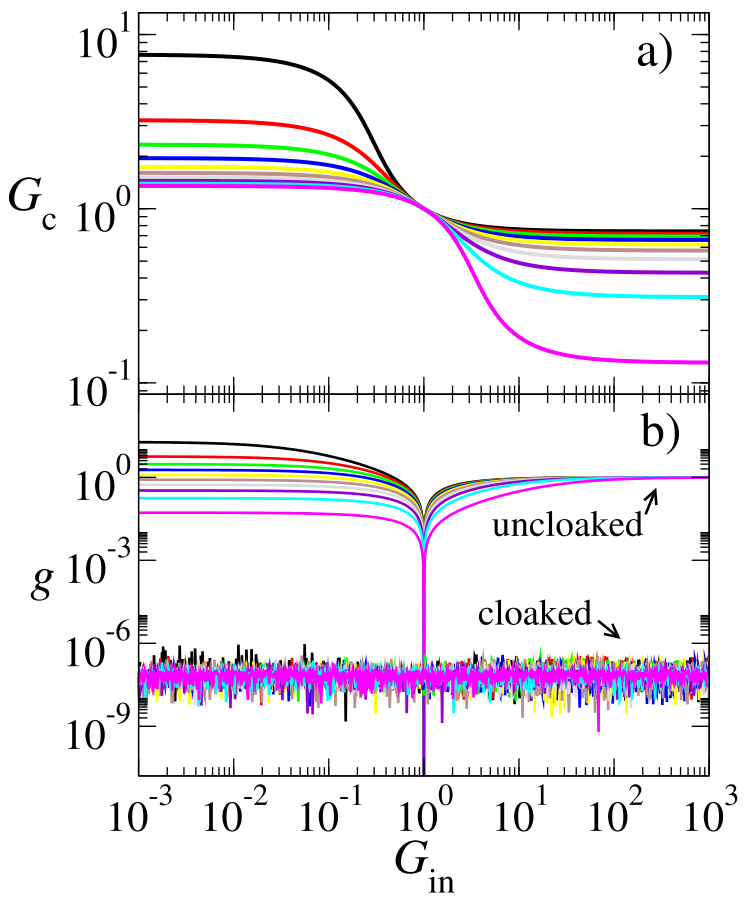
图2:通过用一个从 延伸到 的单个圆环包裹半径 的夹杂来实现压缩隐身。(a) 斗篷模量 作为夹杂模量的函数。整个系统的泊松比 均匀,,曲线颜色从左到上到下依次为黑色、红色、绿色、蓝色、黄色、棕色、灰色、紫色、青色和品红色。(b) 通过比较位移场(式(21))的扰动程度来展示隐身性能,对比有斗篷夹杂(底部曲线)与无斗篷夹杂(顶部曲线)的情况。颜色方案与(a)一致。
静水压隐身
作为对压缩和剪切任意混合隐身的热身,我们首先考虑只压缩 (或膨胀 )的更简单任务。此时剪切分量 ,子系统(III)和(IV)有平凡解 ,给出 :各向同性压缩中的变形场与 无关,这与预期一致。
我们在式(21)中的隐身度量因此简化为 ,隐身任务变为在周围介质中设计 。回忆这个量出现在子系统(II)的解向量 中,其控制矩阵 编码了式(17)和(19),因此取决于弹性模量 和 以及泊松比 和 。实际上,对于任意选定的 ,这个系统 将被精确指定,其解 的每个分量通常非零。
为了实现隐身,我们需要一个额外的自由度,可以调整以设计周围介质中的单一条件 。因此,我们需要一个可调模量 的单一隐身圆环。线性性质进一步确保,对于任何夹杂 ,相同的隐身模量 将隐身任何压缩 。数值求解单个圆环的子系统(II)时,我们采用下山单纯形法(Teukolsky et al., 1992),在给定任何夹杂模量 的情况下,在斗篷模量 的取值范围内最小化解向量 中周围介质的 。见图2。我们实现了 的隐身度量,仅受数值容差限制,表明实现了本质上完美的隐身。
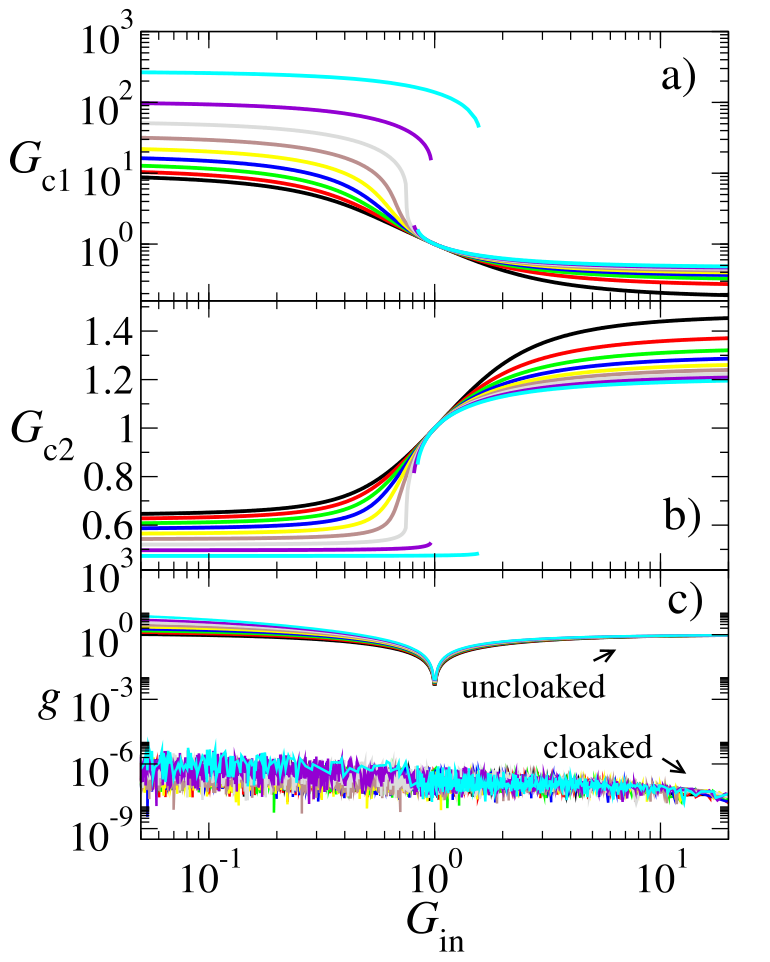
通过用两个同心环包裹半径 的夹杂体,实现任意混合的简单剪切与纯剪切隐身。其中内环从 延伸至 ,外环从 延伸至 。(a) + (b) 内、外隐身环的模量 和 分别作为夹杂模量的函数。系统中泊松比 均匀分布,曲线(从下到上对应 ,从上到下对应 )的泊松比依次为 ,颜色依次为黑色、红色、绿色、蓝色、黄色、棕色、灰色、紫色、青色。(c) 隐身性能如图 2(b) 所示。
任意混合纯剪切与简单剪切的隐身设计
我们现在转向剪切隐身,此时压缩量 。子系统 II 具有平凡解 ,这使得周围介质中 。因此,我们的隐身度量简化为 ,其中 出现在子系统 (IV) 的解向量中,而 出现在子系统 (III) 的解向量中。注意到子系统 (III) 和 (IV) 是等价的,因此消去 和 也会自动消去 和 。于是,隐身任务简化为在周围介质中构造双条件 和 。
与往常一样,对于任意给定的夹杂模量 ,子系统 (IV) 的控制矩阵 对应的解向量 的各分量一般均非零。为实现隐身,我们需要两个额外的自由度,通过可调参数来构造 和 这两个条件。因此,我们需要两个具有可调模量 和 的隐身环。基于线性性以及子系统 (III) 和 (IV) 的等价性,相同的隐身模量 和 可以对任意给定的夹杂模量 ,实现任意混合的纯剪切 和简单剪切 的隐身。通过数值求解带有两个环的子系统 (III),我们在其解向量中最小化 ,并遍历 和 的取值(对任意给定的 )。结果如图 2 所示,再次证实了本质上的完美隐身,此时 。
任意混合压缩与剪切的隐身设计
我们最后考虑剪切与压缩混合的隐身。此时必须同时考虑子系统 (II) 和 (IV)=(III),目标是将度量 降至零。(我们已从式 (21) 中移除了 ,它与刚体转动相关,且如前所述自动为零;同时也移除了 ,一旦 被消去,它们也会自动为零,这一点前文也已提及。)因此,我们现在需要三个可调量——三个具有独立可调模量 和 的隐身环,以便将 和 分别调至零。控制方程的线性性意味着,相同的 和 组合可以对任意给定的夹杂模量 ,实现任意混合的压缩与剪切的隐身。通过同时数值求解带有三个环的子系统 (I) 和 (IV)=(III),我们在解中遍历 和 (对任意 )并最小化 。结果如图 4 所示,再次展现了本质上的完美隐身。
然而,我们仅能在图 4 中找到正泊松比 的常规材料下混合压缩与剪切的隐身解,而无法在拉胀材料()中找到。不过,我们确实在图 2 和图 3 中分别实现了拉胀材料下压缩与剪切的隐身。
数值求解验证
到目前为止,我们已经通过解析计算预测了完美隐身的条件。现在,我们通过在双周期盒中对弹性材料进行直接数值模拟来验证这些预测。在一个 维、包含 个格点的晶格上,我们按如下方式数值求解方程 (1) 至 (3):
首先,我们在方程 (2) 的应力项中加入一个由黏度 描述的耗散贡献:,其中应变速率 ,速度 。
随后,我们采用时间步长算法,每个时间步包含两个独立的子步:
- 弹性更新子步:每个格点的应变按 进行增量更新,时间步长为 。更新后的应变 被用于计算方程 (2) 中更新后的弹性应力 。
- 力平衡子步:在周期边界条件下,将该弹性应力变换到傅里叶空间。通过对包含耗散贡献的总应力场施加力平衡条件,可以计算出速度的非仿射贡献,进而得到速度梯度场。
将该速度梯度场叠加到均匀的外施仿射应变速率上,得到总应变速率,并在下一个时间步的第一个子步中再次使用。重复此过程,直到应变速率张量的空间平均幅值降至一个很小的阈值 以下,这表明系统已达到静态平衡。
我们首先模拟了一个低模量()或高模量()的单一夹杂,每种情况都施加随机选择的压缩与剪切混合载荷,并使用三个隐身环,其模量取自我们在图 4 中的解析预测。结果显示在图 5 的前两行中,证实了优异的隐身效果。
在解析计算中,我们假设环之间存在完美的锐界面。而在数值模拟中,界面具有由网格尺寸决定的小但非零的厚度。这会对完美隐身产生微小修正,我们在数值中用度量 来表征这一修正,其定义为:在被隐身夹杂之外的空间内,变形场相对于均匀仿射场的平方偏差的积分。该值确实非零(图 6),但随着网格分辨率的提高而减小,这表明当 时,完美的锐界面将恢复完美隐身,这与我们上述的解析考虑一致。
既然单一夹杂可以通过我们描述的方式实现隐身,即使在靠近隐身边界的近场也是如此,那么在周围介质中以任意高填充率排列的多个夹杂也同样可以被隐身。这一点已被图 5 底行的模拟结果所证实。这为在周围介质中制备任意夹杂密度(无论多高)的复合材料提供了一条可能的途径,在这种材料中,夹杂之外的应变和应力场保持均匀。这可能有助于设计出与原始均匀介质具有相同整体体积力学性能,但整体密度更低的复合材料。它也可能潜在地缓解无隐身设计的复合材料中因应力集中而产生的开裂风险增加的问题。
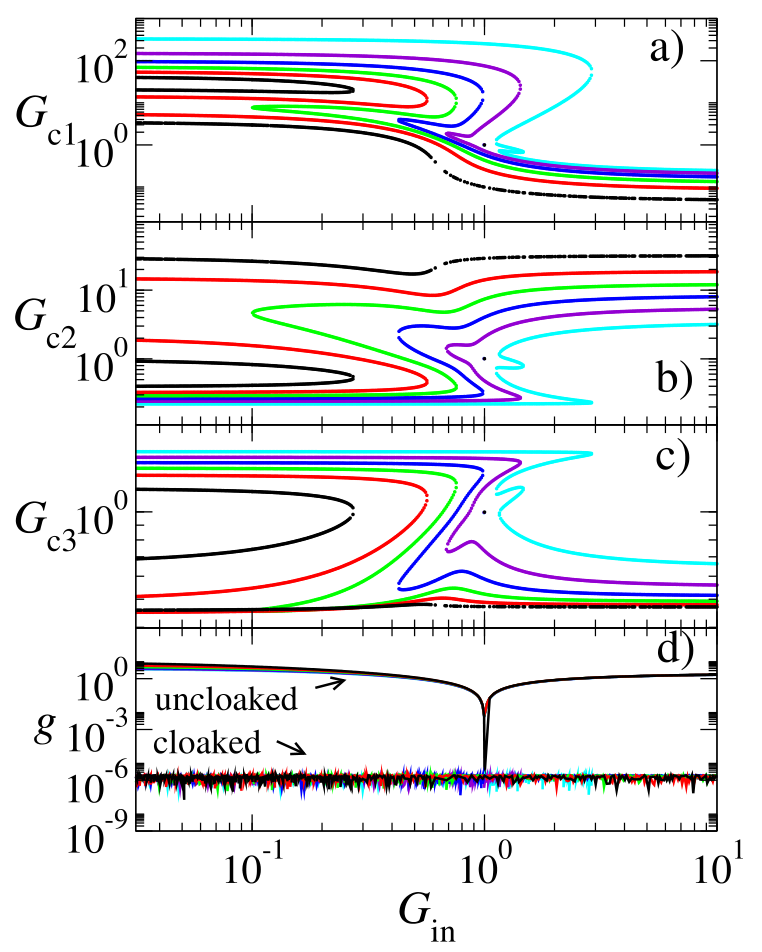
图4:通过用三个同心环包裹半径 的夹杂,实现任意混合的压缩、简单剪切与纯剪切隐身。其中内环从 延伸至 ,中环从 延伸至 ,外环从 延伸至 。(a–c) 内、中、外隐身环的模量 和 作为夹杂模量的函数。所有情况下系统的泊松比 均匀分布,对于 ,曲线(从下到上)的泊松比依次为 ,颜色依次为黑色、红色、绿色、蓝色、紫色、青色。(d) 隐身性能如图 2(b) 所示。
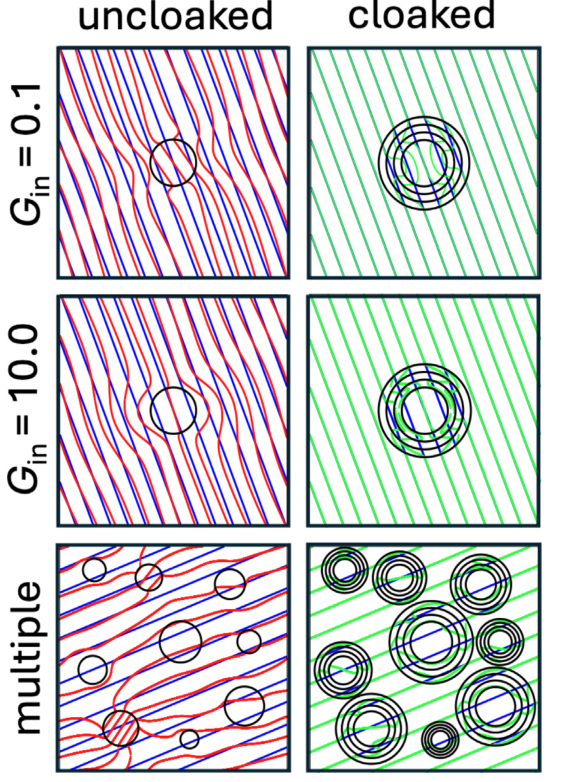
图5:双周期盒中的直接数值模拟,等高线表示恒定水平位移。左:未隐身;右:由三个环隐身。蓝线:无任何夹杂的仿射变形场。红线:有夹杂但无隐身罩的变形场。绿线:有夹杂和隐身罩的变形场,在隐身罩外几乎与仿射场无法区分。上:模量 的单一夹杂,向外的隐身罩模量为 。中:模量 的单一夹杂,隐身罩模量为 。下:九个随机半径的夹杂随机分布。每个夹杂的 从-0.1到+1.0的平顶分布中随机选取。每个夹杂的隐身模量 取自图4中的解析预测。每个变形分量 从-1.00到+1.00的平顶分布中随机选取,其中单一夹杂的 ,多个夹杂的 。周围材料、隐身罩和夹杂的泊松比 。
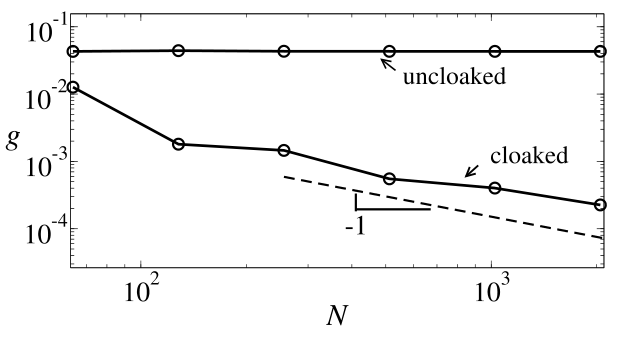
图6:直接数值模拟中,隐身性能随数值网格点数的变化,通过比较被隐身的空洞或夹杂(底部)与未被隐身的空洞或夹杂(顶部)对位移场的扰动程度(式(21))来体现。夹杂模量 。隐身模量 取自图4中的解析预测。外施变形 。周围材料、隐身罩和夹杂的泊松比 。
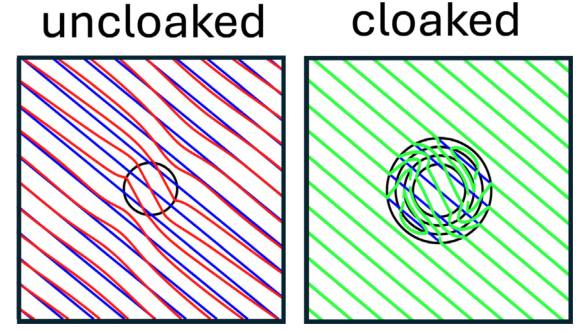
图7:双周期盒中的直接数值模拟,等高线表示恒定水平位移。左:未隐身;右:由三个环隐身。蓝线:无任何夹杂的仿射变形场。红线:有夹杂但无隐身罩的变形场。绿线:有夹杂和隐身罩的变形场,在隐身罩外几乎与仿射场无法区分。这里,我们从0.0到1.0的平顶分布中随机选取每个泊松比 ;从-1.0到1.0的平顶分布中随机选取 ,得到 ;并从-1.0到1.0的平顶分布中随机选取每个变形分量 。随后调谐每个环的剪切模量以实现隐身:。
讨论
我们从理论上证明,通过由三个同心环组成的隐身罩,可以在任意压缩与剪切组合下,对均匀周围介质中的圆形夹杂实现本质上完美的弹性静力学隐身。这种方法可以对从软到硬的全范围圆形夹杂进行隐身。因此,我们还提出,任意形状的夹杂也可以被隐身:首先用一个刚性圆将其包裹,然后按照所述方法用三个环对组合结构进行隐身。与由许多子单元构成的超材料制成的隐身罩相比,本文提出的隐身罩结构简单且效果显著更好。
实际上,在实现本质上完美的隐身性能时,被隐身夹杂外部的应变场(以及应力场)与无夹杂的均匀介质中的场相比未受扰动。因此,我们的结果不仅适用于本文所考虑的任意外施应变,也同样适用于任意外施载荷。
我们在第2节的解析计算表明,分别需要1个、2个和3个可调的隐身剪切模量,才能分别实现对压缩、剪切以及任意混合压缩与剪切的隐身。为简化起见,我们在相关的图2、图3和图4中进行数值计算时,假设整个装置(夹杂、所有隐身环及周围材料)的泊松比均匀,即 。然而,我们的解析方法并不要求装置中任何部分的泊松比值被精确调谐。如上所述,这对于实验制备装置非常重要,因为在实践中,精确规定任何给定材料组分的剪切模量和泊松比几乎是不可能的。
基于这一动机,我们最终在图7中展示了:对于给定的夹杂和周围材料,在任意外施变形下的完全隐身状态,其中每个隐身环的泊松比 是从0到1的均匀分布中随机选取的。对于这组任意选定的 值,我们随后调谐了隐身环的模量 以确保隐身效果。因此,我们强调:对于(线弹性)夹杂和周围介质的任何给定材料组合,实验人员可以(首先)自由地任意选择每个隐身环的泊松比。对于这样选定的任意一组泊松比,只需按照上述规定精确选择每个环的剪切模量即可。
我们的计算预测,在环之间存在完美锐界面的极限情况下可以实现完美隐身。在实践中,任何真实界面都具有由微观结构决定的小但有限的厚度,这意味着隐身效果会略有不完美。然而,值得注意的是,不完美界面也被提出作为增强隐身效果的一种方式(Bertoldi 等,2007;Bigoni 等,1998;He,2002;Ru,1998;Wang 和 Schiavone,2012)。
我们的研究聚焦于 空间维度下的圆形夹杂。未来的工作应将本文发展的解析论证扩展到 维度下的球形夹杂。此外,我们的计算是在线弹性框架下进行的,因此适用于小变形和/或与材料模量尺度相比较小的载荷系统。我们将非线性弹性框架下的隐身研究留待未来工作。