利用微晶格设计编程三维曲面介观结构
细胞微结构自然形成于许多生物体(例如,花和叶)中,以提供合成、营养运输和生长调节等重要功能。尽管异质细胞微结构被认为在它们的三维(3D)形状形成中起关键作用,但用细胞设计编程3D弯曲中间表面在人造系统中仍然难以实现。我们报告了一种理性微格子设计,允许通过机械引导组装将二维薄膜转换为可编程的3D弯曲中间表面。分析建模和基于机器学习计算方法作为形状编程的基础,并确定目标3D弯曲表面所需的异质二维微格子图案。大约30种几何形状被呈现,包括规则和生物中间表面。演示包括一个适形心脏电子设备、一个黄貂鱼状双模执行器和一个3D电子细胞支架。
三维(3D)细胞微结构在生物体中无处不在,它们在其中发挥着多样且不可替代的作用,包括三维形状形成(1-4)、营养物质的合成与运输(5, 6)以及生长和繁殖的调节(7, 8)。例如,毛酸浆浆果和欧亚繁缕花中非均匀分布的细胞微结构形成了封闭的笼状结构,为其椭圆形的萼囊提供了足够的刚度(图1A,左侧和中左侧);卷心菜叶子中复杂的维管网络在温度降低时可以局部收缩和单向增厚,从而形成多层球形结构(图1A,中右侧);而塔形冠盖藻细胞壁中遍布六边形腔室、类似蜂窝的细胞微结构则提高了其光合作用效率(图1A,右侧)(1)。
由于细胞结构具有高表面积、大孔隙体积以及优异的机械和热性能,细胞设计已被用于开发材料和功能系统(9, 10)。例子包括具有高比刚度、比强度和抗冲击性的晶格材料和泡沫(3, 11-15);多孔电子具有微小离子扩散距离和大量活性材料比例的高功率锂离子电池(16, 17);具有能够进行氧气和养分供应及废物清除的分级血管化网络的人工组织和器官(5, 6, 18);能够阻挡、吸收、增强或弯曲电磁波的电磁超材料(19);以及用于水分解和氧还原反应的金属有机框架(20)。
受到如图1A所示的细胞生物表面启发,我们开发了一种微格子设计策略,作为实现二维微膜所需刚度分布的有效途径,从而允许其通过力学引导组装转变为可编程的三维曲面介观表面。我们建立了一个分析模型和一个基于机器学习的计算方法,用于从具有优化孔隙率和晶胞尺寸分布的二维微格子图案逆向设计目标三维曲面介观表面。尽管依赖于通过厚度工程实现薄膜空间刚度控制的策略(21, 22)、具有可编程应变分布的软活性材料(23-27),或剪纸和折纸镶嵌中晶胞几何形状和旋转的约束优化(28-31)的二维到三维组装的逆向设计方法已有报道,但适用的材料和长度尺度的局限性阻碍了它们在三维微电子器件中的应用(32, 33)。
微格子设计策略用于三维膜曲面的曲率编程
图1阐释了这种受生物启发的微格子设计策略的核心概念和功能。该策略引入了一种具有工程化格子图案的二维薄膜,该图案由空间变化的三角形单元和微米级的细带状结构。采用三角形晶格设计,而非带有圆形孔的细胞设计,是因为它缓解了应力集中并具有对复杂形状边缘的优异适应性(图 S1)。图1B展示了以圆形设计域 为例的微晶格设计策略示意图。我们使用三角形晶格来离散指定的设计域(图 S2),将该域划分为 个三角形单元,包含 个晶格节点。(其中 )和 分别是第 个三角形单元(其中 )的边长和孔隙率; 和 1 表示两种极限条件,即没有任何孔隙的实体材料区域和没有任何材料的区域。考虑到三角形晶格的拉伸主导机制,有效模量()与单元的相对密度()成比例,即 ,因此微晶格孔隙率的分布是调整刚度分布的关键参数。我们用 表示在力学组装中与预拉伸弹性体(预应变, 和 )键合的节点集合(总共 个节点)。相应地,面内位移 ()被施加到此节点集 以触发二维到三维的组装,其中 和 是第 个节点沿 和 方向的位移分量。一旦给定了孔隙率分布 、键合位点的节点集 和预应变( 和 ),力学组装产生的三维介观表面即可确定,这对应一个正向问题。图 S3 提供了一组示例,它们具有相同的方形设计域 、键合位点和单轴预应变(30%)。分配不同的孔隙率()分布会产生截然不同的三维表面几何形状,表明孔隙率分布在定制组装介观表面几何形状中的关键作用。
微晶格策略的实际应用需要一个合理的逆向设计方法作为理论基础。在此,逆向设计问题侧重于针对目标三维曲面和指定的三角形单元数量(),确定孔隙率分布、键合位点和预应变。以一个章鱼状介观表面为例来说明逆向设计的关键步骤(图1C)。设计目标(图 S4A)是通过简化复杂的生物表面得到的,它由一个轴对称的“头部”区域和八个弯曲的“触手”组成。将头部区域离散化为八个在中心区域相互连接的子曲面,可以利用基于梁理论的模型(详见补充文本)来获得二维前驱体中的弯曲刚度和孔隙率分布。各种触手形状也可以通过使用该模型。然后,可以生成二维微晶格图案,以及键合位点的节点集。基于有限元分析(FEA)和实验测量组装的二维表面几何形状均与设计目标高度吻合(图1C和图S4,B和C)。章鱼状介观表面的大部分区域的最大主应变小于1%,表明在组装过程中常用的电子材料(例如Si、Au、Cu和Ti)不会发生断裂失效(图S4B)。在此,微细加工技术(材料与方法以及图S5至S9)允许制造双层材料(200 nm Cu和12 μm聚酰亚胺(PI))中的图案化二维微晶格,其最小带宽度为10 μm。力学引导组装的实验遵循了先前报道的类似程序(图S10)(34, 35)。
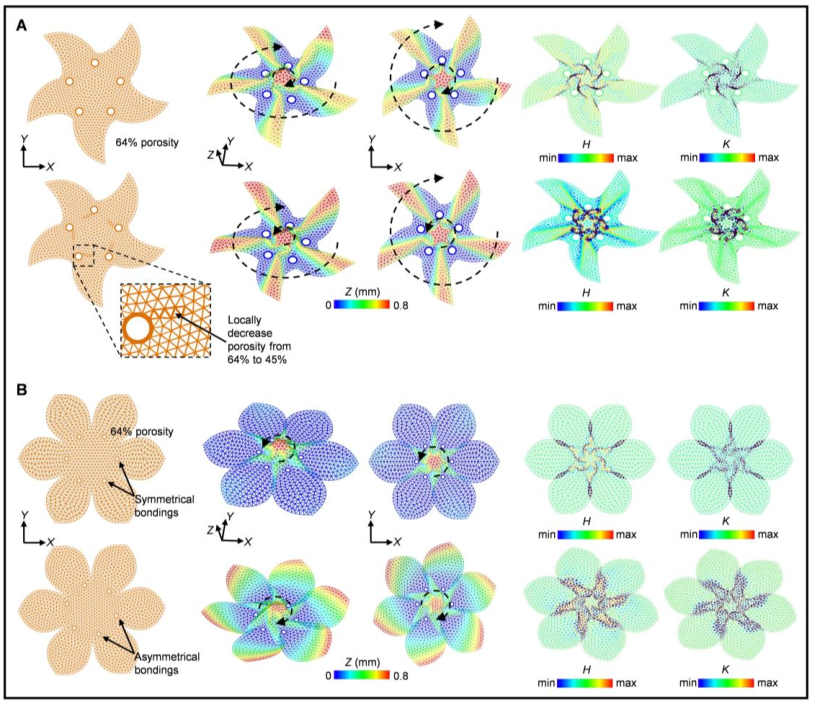
微晶格设计策略赋予了微膜一种局部离散但整体连续的几何特征,这使得微膜能够实现实体微膜无法实现的离散性介导的变形机制。这种离散性介导的变形机制主要发生在具有内部键合位点的微膜中,其中通常会产生局部化变形。以一个具有四个对称分布的内部键合位点的圆形微膜为例来描述这种机制(图S11)。尽管结构几何形状和载荷条件关于轴和轴对称,屈曲变形显示出两种由离散性介导的可能模式。对于实体或密集分布的微晶格薄膜,涉及扭转变形的手性模式在能量上更有利(图S11,B和C)。当微晶格足够稀疏以适应带状构件的弯曲主导变形时,对称模式在能量上变得更有利。尽管实体微膜显示出一种手性屈曲模式,但其扭转方向是随机且不可控的。利用微晶格薄膜的离散性介导变形,为具有可控手性的三维介观表面提供了一条途径,例如,通过在两个键合位点的中间区域引入略微降低的孔隙率(图S12)。图1D和图S13展示了两种受曼陀罗和栀子花启发的介观表面,其中的手性是通过孔隙率控制方法定制的(参见补充文本)。
用于合理组装三维介观表面的微晶格设计方法
基于梁理论的模型允许对二维带状结构和轴对称介观表面进行逆向设计(图2和图S14至S20)。通过将直带状微晶格均质化为实体带状结构并使用欧拉-伯努利梁理论,可以解析地获得目标带状结构的关键设计参数[包括孔隙率和预应变](参见补充文本和图S14至S16)。大多数轴对称三维表面是不可展开的,因此无法直接由几何连续的二维薄膜组装而不涉及大的薄膜应变(例如,>5%),这对于大多数无机电子材料是无法承受的。我们引入了一种基于离散化的近似方法,使得基于梁理论的模型可用于轴对称介观表面的逆向设计。该方法将目标表面均匀地划分为个子表面(图S17),每个子表面可被视为一个具有非均匀宽度的带状结构。然后,可以为目标表面确定孔隙率分布和预应变。图2A展示了一个用10个子表面近似的半球形介观表面(补充文本),其中组装后的三维介观表面的光学图像和数值模拟与目标表面高度一致。实验使用双层材料(200 nm Si和8 μm PI)进行制造,所得半球形介观表面的直径约为2 mm(影片S1)。类似地,所提出的方法允许对球冠(100 nm Au或Ti和8 μm PI)(图S18,A至C)和具有不同纵横比(3、2/3和1/3)的半椭球形介观表面(100 nm Au或Ti和12 μm PI)进行逆向设计(图S18,B至F)。在离散化中仅使用10个子表面即可获得相当接近的三维介观表面(图2A和图S18,A至F)。这些结果说明了基于微晶格策略的逆向设计方法的有效性。
引入内部键合位点允许组装的三维介观表面的曲率改变其符号,从而扩展了三维介观表面的范围。图2B展示了一个火山状介观表面(100 nm Ti和8 μm PI),其在中心区域有一个火山口状的凹坑(直径约1.4 mm)。为内部和外部表面的连接区域分配高孔隙率水平(90%),使得可编程的折叠变形能够再现斜率不连续的几何特征(影片S2)。使用单个内部键合位点,也可以精确地获得甜甜圈状的三维介观表面(图S18,G和H)。添加更多内部键合位点允许组合两个或更多定制的三维介观表面,丰富了可实现的轴对称介观表面范围。图2C、图S18I和影片S3提供了两个宫殿状介观结构,分别由外部区域的圆环面和内部区域的圆柱体(或半球体)组成。近似闭合形式的几何形状也是可能的,图2D、E和图S19D、E展示了两个示例。
上述基于梁理论的模型也允许对具有旋转对称性的三维介观表面进行逆向设计,包括从真实植物重建的复杂仿生介观表面。例如,蓝莓花有五个花瓣和一个花柱,它们的形状可以通过离散点采样进行重建,作为我们的设计目标(图2F,左侧,和图S20A)。然后,可以通过逆向设计方法确定双层二维前驱体图案和预应变(图2F,中左,和图S20B)。所得仿生微晶格结构如图2F中间所示。类似地,可以逆向设计和制造一个被闭合椭圆形囊包围的仿生_P. philadelphia_浆果(图2G和图S20,C和D)。这种逆向设计方法可以进一步扩展到具有轻微不对称性的曲线介观表面。在这种情况下,将介观表面离散成一定数量的不均匀曲线带状结构,并且可以通过优化孔隙率分布和预应变来重现每个带状构件。图2H、I和图S21提供了两个示例,其设计目标模仿了花园蜘蛛的腹部和一个不对称花盆。
设计一个应变限制框架来连接组装好的三维介观表面的键合位点,可以将它们从庞大的弹性体基底上分离出来,而不改变其几何构型(图S22)。基于这种简便的分离方法,制造了具有多种构型的独立式三维介观表面,包括章鱼头状介观表面、半椭球形介观表面和球冠,其横向尺寸范围从约600 μm到约14 mm(图2J和图S23)。力学建模表明,三维介观结构与应变限制框架之间的刚度比是影响形状固定的主要参数(参见补充文本和图S24)。此外,扩展的材料兼容性、广泛适用的长度尺度和丰富的结构拓扑(图2J、K和图S25至S27)表明微晶格策略在设计三维功能器件和微系统方面具有广泛的能力。
如果目标三维表面不能被离散为一组对称的带状结构,那么上述仅考虑弯曲变形的基于梁理论的模型将不适用。引入机器学习算法可以为具有对称和不对称构型的三维介观表面建立一个强大的逆向设计方法。以海贝壳表面为例(图3A),该方法首先使用能够捕捉关键几何特征(即肋条在此示例中)。利用基于点云的人工神经网络(36),通过有限元分析生成数据集进行训练,预测二维点坐标(, )及其对应孔隙率()(参见补充文本及图S28至S32)。然后,给定最优参数集(, , )及规定网格划分方法,可生成包含12条独立带状结构及键合位点的二维微晶格图案。施加于二维带状前驱体的载荷[即键合位点在X-Y平面内的位移(△x, △y)和旋转角(Θ)]可直接由二维前驱体中键合边缘的坐标确定。
目标海贝壳表面。考虑到丝带组件在屈曲变形过程中轴向伸长或压缩可忽略不计,每个丝带组件通常需要不同的加载条件,这表明整个海贝壳表面无法通过在同一基底上一步组装形成。每个丝带组件在单独的基底上组装(见补充文本),然后使用上述应变限制框架转移到同一平台上,以形成整个3D介观表面(图S33和S34)。目标海贝壳表面、有限元分析和实验中特征点坐标的定量比较显示出高度一致性(图S35)。通过更多战略性切割来细化离散化,可以提高所得介观表面与设计目标的一致性(图S36)。如上所述,3D复杂介观表面与2D微晶格薄膜之间的映射实际上被简化为一组3D点云(, , )与另一组(, , )之间的映射。因此,计算成本可以显著降低,从而有助于复杂3D表面的逆向设计。该方法中用于离散目标表面的策略很重要。对于具有近似旋转对称性的三维表面,一组穿过中心线的平面可以将介观表面划分为离散的丝带组件。甜椒和杨桃作为两个介观表面,可以按照这种离散化策略进行逆向设计(图3B和图S37、S38,A和B)。提取特征点的空间坐标允许对仿生微晶格结构与目标表面之间进行定量形状比较(图3B和图S37,右图,以及图S39,A和B)。对于没有明显对称性的介观表面,可以根据几何特征首先将目标表面划分为若干子表面部分,然后每个部分可以使用适当的策略(例如,径向切割或平行切割)进一步离散化。作为一个例子,图3C和图S38C、S39C展示了一个类似于面膜的目标表面的逆向设计结果。这里,逆向设计首先将表面切割成三个部分,然后分别将这些部分离散化为五个、三个和五个丝带组件,分别对应"额头"、“鼻子"和"下巴"部分。图3D展示了所提出的逆向设计方法在生成一个蚂蚁状介观结构中的应用,其中主体部分使用类似于计算机断层扫描(CT)的切割策略进行离散化。六条腿和两个触角被分别设计,然后在主体部分组装后添加到主体上。整个由4034个微三角形和7826个微细带组成的蚂蚁状微晶格结构准确地再现了设计目标(图3D和图S38D、S39D),显示了基于点云的方法在设计高度复杂的三维介观表面方面的能力。
基于仿生微晶格设计的器件应用
仿生微晶格设计允许构建具有所需曲率分布的三维电子系统,以贴合或复制生物组织和器官的弯曲表面。图4A展示了一个用于心脏传感、光学刺激和热消融的可呼吸半球形电子器件。该器件包含11个蓝色mini-LED、4个芯片热敏电阻和1个加热器,位于PI微晶格框架(10 μm)上的铜线(250 nm)用作电连接(图S40)。这里,我们引入了优化的蛇形结构作为应变限制框架,其中组装后的半球形形状不仅可以在独立状态下良好保持,还可以变形以适应非球形表面,从而产生高信噪比温度传感(图4B和图4C,上图;图S41;和影片S4)。微晶格设计不仅减少了对心脏的物理限制[例如,界面粘附和皱褶(37, 38);图S41F],还为心包中的润滑液提供微通道,以避免心包粘连。该器件可用于治疗心律失常(39)。蓝色微型LED阵列可以进行大面积光学刺激的光遗传治疗,微型加热器能够进行局部热消融以抑制心脏表面的异常电信号(图4C,下图)。
模仿生物体动态特性的仿生三维介观结构也可以利用微晶格设计实现。图4D、图S42和影片S5展示了一个具有弯曲身体和一对"扇形鳍"的魟鱼状三维介观结构。集成在鳍上的两个电路可以在沿身体长度方向的固定磁场(B)下,对三维介观结构产生周期性变化的洛伦兹力(图4D和图S42)。通过改变两个电路中的电流方向并调整其频率,可以激发不同的振动模式(图4E和F)。由于它们不同的变形特征,这两种模式的测量共振频率(5赫兹和100赫兹)之间的差异是明显的。
开发模仿体内三维微环境的三维生物模型和平台对于研究细胞的基本行为(例如,生长、凋亡和发病机制)具有重要意义。例如,位于外血视网膜屏障-血管复合体三维弯曲表面的视网膜色素上皮(RPE)细胞在视网膜和血液之间运输生物分子至关重要,但现有的RPE细胞培养模型仅限于二维平面几何结构(40)。这里展示了一种具有集成传感能力的球冠形电子细胞支架(图4,G至I;补充文本;和图S43),其曲率半径(约7.5毫米)接近兔RPE的曲率半径。RPE细胞被种植在三维支架上,然后培养15天,每2天更换一次培养基。图4,J和K提供了在电子支架上生长的RPE细胞的荧光染色图像。可以看到,由于三维支架相对封闭的构型和微米级晶格(微细带长度为5至62 μm,与RPE细胞大小相似),RPE细胞均匀地分布在整个弯曲表面。作为证据,图4K,右下角,以及图4L和图S44显示,RPE细胞可以跨越弯曲介观表面相邻丝带组件之间的间隙相互连接。基于三维电子支架的阻抗测量结果如图4,M和N所示。因为RPE细胞在电刺激下浸没在培养基中时表现为介电材料(41, 42),所以在支架上生长RPE细胞后可以观察到阻抗的明显增加(图4M)。为了测试阻抗测量对RPE细胞生理活动的敏感性,使用胰蛋白酶溶液处理这些细胞,并记录阻抗的时间响应(图4N)。随着胰蛋白酶处理时间的增加,阻抗迅速下降并最终稳定,因为胰蛋白酶导致RPE细胞收缩并部分从支架上脱离,如图4O和图S45所示的光学图像所证明。这些结果表明,三维电子细胞支架作为一个无创平台,可用于研究细胞生理活动(例如,生长和凋亡)的实时空间分布。
结论
本文提出的仿生微晶格设计策略和逆向设计方法允许将二维薄膜合理组装成具有各种几何形状的所需三维介观表面,从规则表面(例如,半球形、球形、半椭球形和半环形表面)到高度复杂的表面(例如,类似于火山、花朵、水果、章鱼和蚂蚁的表面)。原则上,微晶格设计适用于广泛的材料,包括但不限于本工作中展示的材料(硅、金属、壳聚糖、聚酰亚胺、SU8和激光诱导石墨烯)。与先前用于局部刚度控制的策略(21-24)相比,所提出的微晶格设计在可实现的几何形状、适用材料和组装三维表面的长度尺度方面取得了根本性进展(见补充文本)。在贴合三维心脏电子器件、仿生双模执行器和三维电子细胞支架中的演示表明了在生物电子学、微机电系统和微型机器人领域的广阔应用前景。此外,微晶格策略可用于设计光学器件,例如具有角度相关反射率的光学超表面(图S46)。
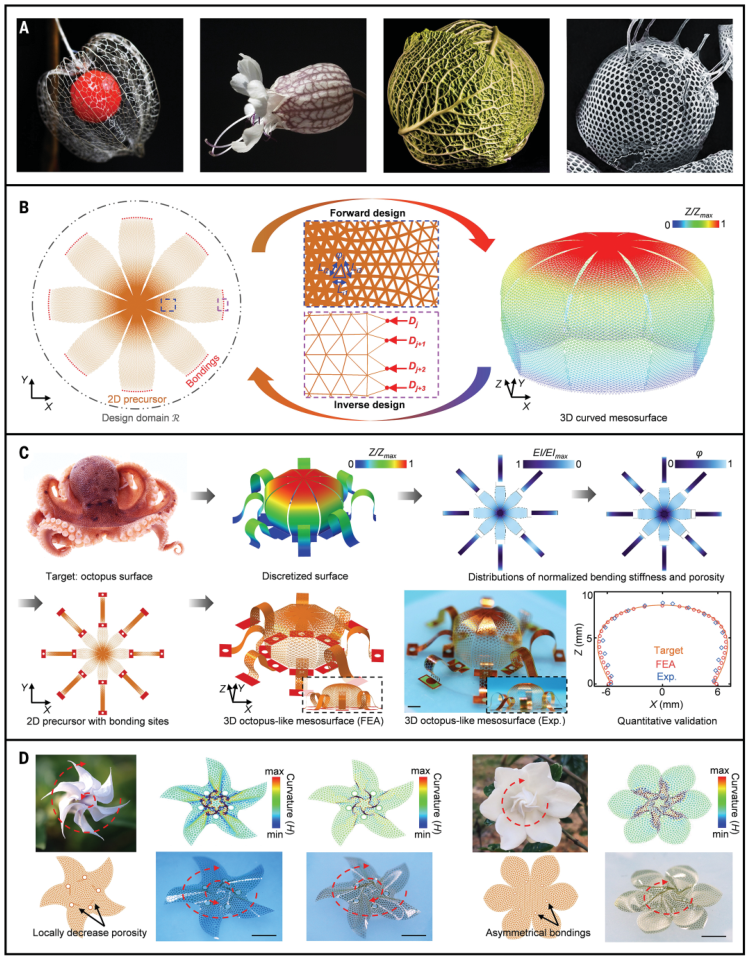
图1. 基于仿生微格子设计策略的三维曲面中尺度表面曲率编程概念示意图 (A) 一个Physalis philadelphica浆果(左)和一个S. vulgaris花(中左)的光学图像,具有椭圆形网状花萼囊;具有复杂脉管网络的多层球形卷心菜叶(中右);以及一个具有蜂窝状细胞壁的S. turris硅藻[经Jantschke等人(1)许可转载,版权2014,英国皇家化学会]。 (B) 在仿生微格子设计策略框架下三维曲面中尺度表面的正向和逆向设计示意图。此处,φi和Lik(其中k = 1, 2, 3)分别表示设计域Re中编号为i的三角形单胞的孔隙率和边长,Dj是键合区域中编号为j的节点的位移矢量(djX, djY)。 (C) 基于离散化方法、具有优化微格子图案的章鱼状中尺度表面逆向设计的有限元分析和实验结果。 (D) 两种花状介观结构(左:D. stramonium,右:G. jasminoides Ellis)以及键合位点分布在二维微格子内部基于生物启发的设计。比例尺,2毫米。
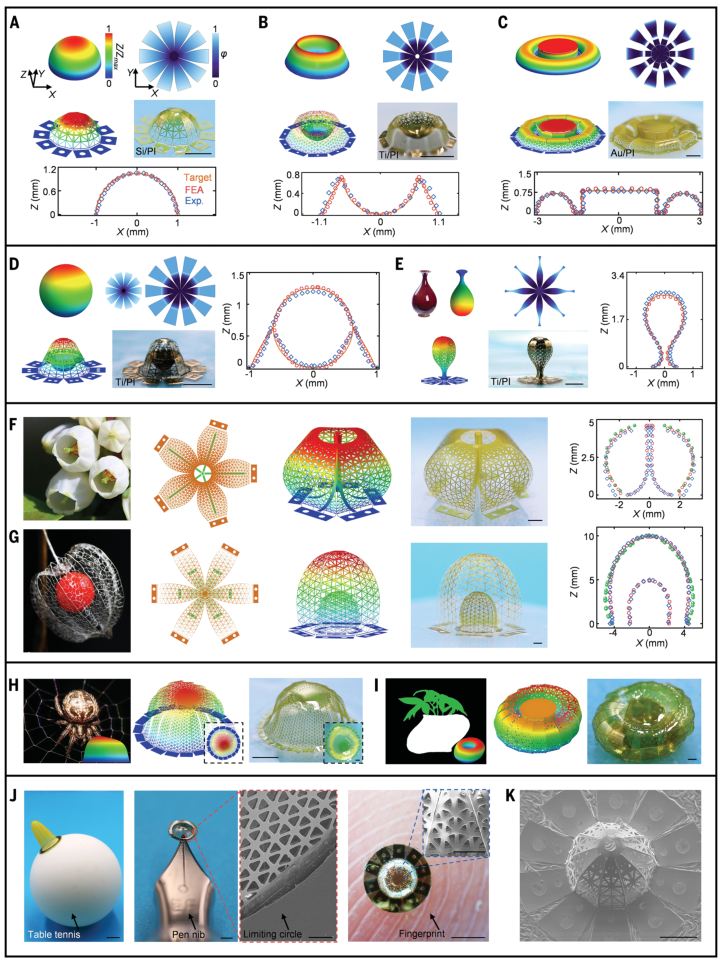
图2. 基于分析模型的三维曲面介观表面逆向设计。 (A至C) 半球形介观表面 (A)、火山形介观表面 (B) 和宫殿形介观表面 (C) 的目标几何形状、二维前驱体图案的孔隙率分布以及相应的有限元分析和实验结果。(D和E) 封闭形式三维介观表面的逆向设计:悬浮球形介观表面 (D) 和花瓶形介观表面 (E)。(F和G) 具有双层布局的两种植物介观表面的逆向设计:蓝莓花 (F) 和费城莓 (G)。绿点是从植物表面采样的。(H) 类似于花园蜘蛛弯曲腹部的非对称表面的目标几何形状、有限元分析和实验结果。(I) 非对称花盆的逆向设计的类似结果。(J) 具有不同纵横比和长度尺度(从毫米到微米)的三维孤立介观表面。比例尺: (A) 至 (I),1毫米;(K),100微米。(K) 半球形微表面的扫描电子显微镜图像(30纳米钛和2.7微米聚酰亚胺)。比例尺: 在从左到右的三个光学图像中分别为5毫米、1毫米和500微米,在扫描电子显微镜图像中为100微米。
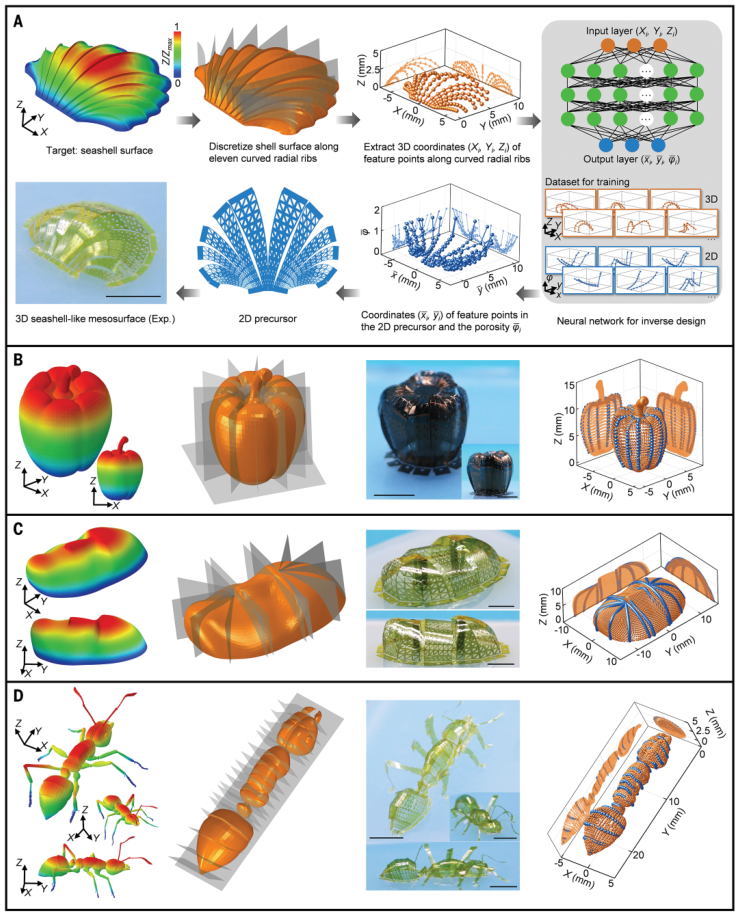
图3. 基于点云的机器学习方法用于3D复杂介表面的逆向设计 (A) 海贝壳介表面(20 nm Ti和7 µm PI)逆向设计过程的示意图。(B) 目标几何形状、离散化策略、实验结果,以及针对辣椒状介表面(200 nm Ti和7 µm PI)的计算点云(蓝色)与设计目标(橙色)之间的比较,该介表面使用一组穿过中心线的平面被划分为离散的带状组件。(C) 对于面具状介表面(20 nm Ti和7 µm PI)通过径向和平行切割进行区域离散化的类似结果。(D) 基于类似于CT扫描的切割策略的蚂蚁状表面(20 nm Ti和7 µm PI)的类似结果。比例尺,5 mm。
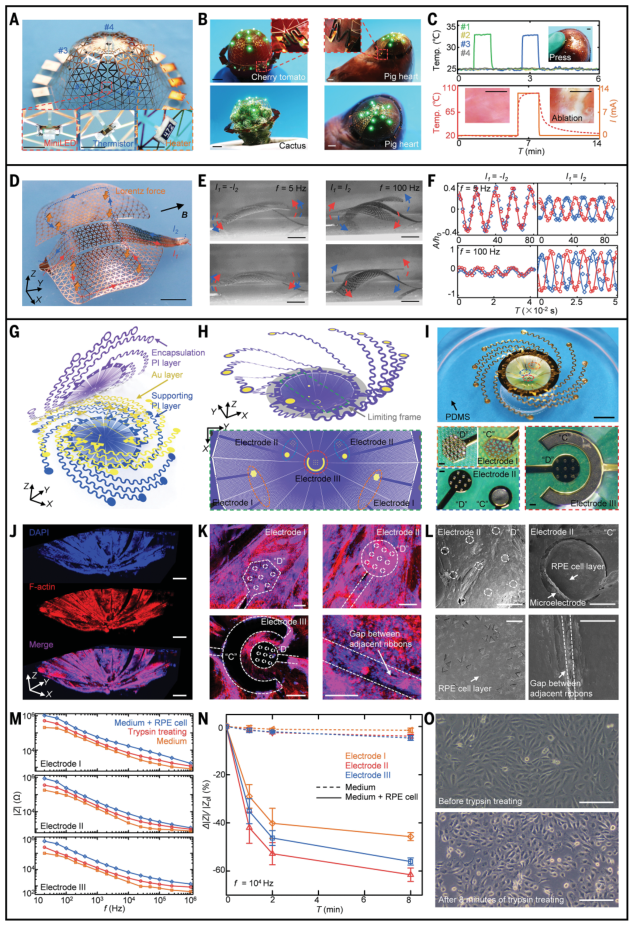
图4. 基于仿生微格子设计的3D曲面介观表面的应用。(A) 集成迷你LED、芯片热敏电阻和加热器的可呼吸半球形电子设备的光学图像。(B) 包裹在樱桃番茄、仙人掌和猪心顶端区域的共形电子设备。(C) 手指按压(上部)和心脏局部区域热消融治疗期间(下部)心脏表面温度变化测量值。比例尺:(A)和(C),1毫米;(B),5毫米。(D) 具有两侧布置电路的黄貂鱼状执行器的光学图像。(E和F) 洛伦兹力激发的3D执行器的两种振动模式(左:上下模式;右:左右模式)的光学图像和振幅响应。A和分别是两个“鳍”前端的振动幅度和初始高度。比例尺,5毫米。(G至I) 电子细胞支架的2D前体设计示意图(G)、组装的3D配置的有限元分析结果(H)及相应的实验结果(I)。比例尺在(I)中,5毫米(上部)和100 (下部)。(J和K) 带有视网膜色素上皮细胞的电子细胞支架的荧光染色图像和放大图像。比例尺:(J),1毫米;(K),200 。(L) 冷冻干燥后局部区域的SEM图像。比例尺,100 。(M) 三种不同条件下电极I、II和III的阻抗曲线。(N) 10 kHz下阻抗的相对变化作为三种不同电极胰蛋白酶处理时间的函数。显示了四次独立实验的平均值及标准差。(O) 胰蛋白酶处理前后8分钟的视网膜色素上皮细胞的光学图像。比例尺,20 。
补充材料
A1. 硅/聚酰亚胺(PI)、金属/PI、金属/壳聚糖、激光诱导石墨烯(LIG)/PI和金属/光刻胶环氧树脂(SU8)中3D介观表面的制备。
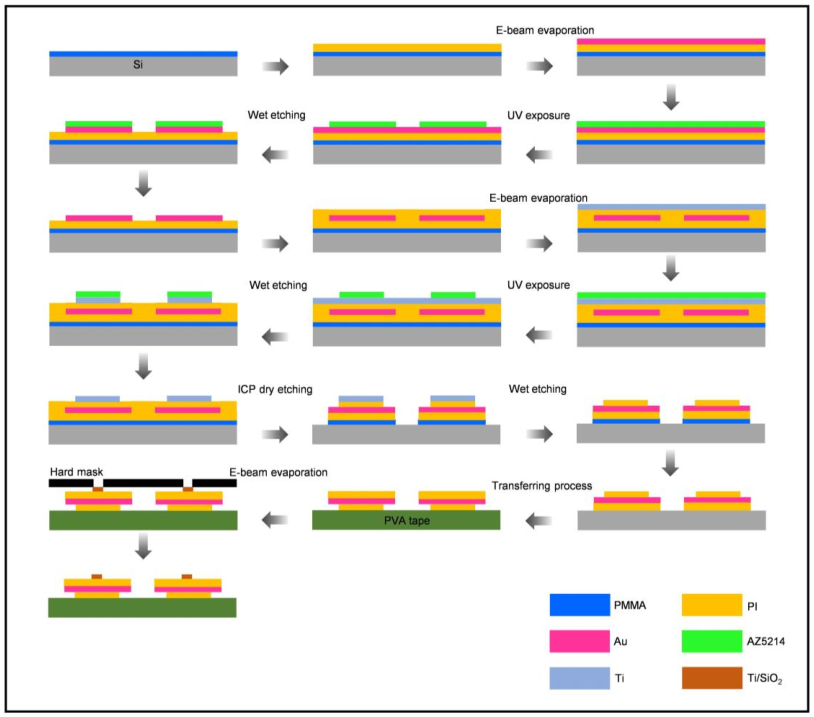
在单晶硅/PI/Cu中制备3D微表面始于在硅上绝缘体晶圆(100 nm Si/375 nm SiO₂)上旋涂一层薄的PI层(厚度约2.7 μm),随后进行退火处理(250°C,3小时)。使用电子束蒸发沉积一层薄的Cu层(厚度约50 nm),结合光刻和剥离工艺,在Cu上形成2D微晶格图案。使用感应耦合等离子体干法蚀刻PI层和硅层后,将SOI晶圆浸入氢氟酸中2小时以去除SiO₂层,完成了2D前驱体结构的制造工艺。将2D前驱体结构转印到一片水溶性胶带(聚乙烯醇,PVA)上,然后使用硬掩模(例如,通过激光切割图案化的钢片,厚度约30 μm)在2D前驱体结构上沉积40 nm Ti和50 nm SiO₂层,定义了键合位点的图案。一片薄的(约1 mm)硅橡胶片(Dragon Skin,0010,Smooth-On)用作组装平台,并使用定制的机械平台将其拉伸到确定水平的双轴预应变。将预应变基底和2D前驱体结构暴露于紫外臭氧中,使它们暴露的表面产生羟基终止。将PVA胶带层压到基底上,并在80°C的烘箱中烘烤约10分钟,在基底和键合位点之间形成强共价键。用去离子水清洗基底约2分钟溶解掉PVA胶带,随后向2D前驱体结构滴几滴乙醇以减少界面粘附的影响。缓慢释放基底的预应变完成了单晶硅/PI/Cu中介观结构的3D组装过程。
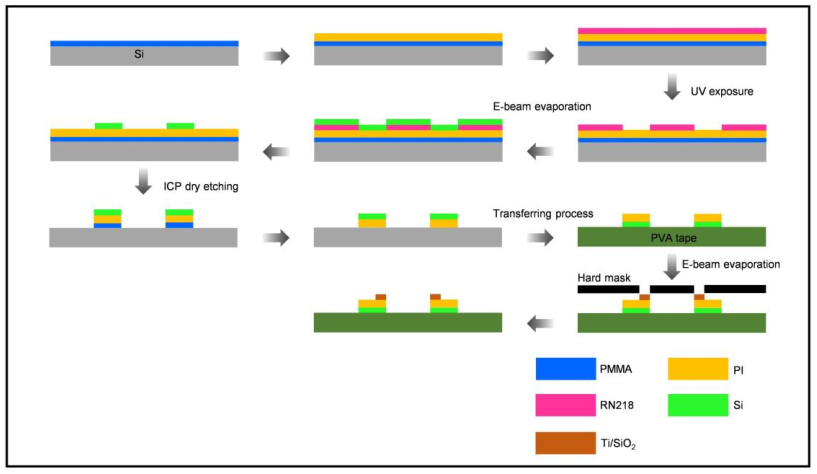
制备包含非晶硅和PI的3D介观表面始于在硅晶圆上旋涂一层聚甲基丙烯酸甲酯(厚度约200 nm),随后再旋涂形成均匀的PI覆盖层(厚度约5 μm)。旋涂一层负性光刻胶(RN218,RESEMI,中国),结合随后的光刻、电子束蒸发和剥离工艺,在PI顶部创建硅图案(厚度约200 nm)。ICP蚀刻PI层后,将硅晶圆浸入丙酮中1分钟溶解PMMA层,随后将2D前驱体结构转印到一片水溶性胶带(聚乙烯醇,PVA)上。后续步骤,包括转印工艺、Ti/SiO₂键合位点图案化和在基底上的3D组装,与上述步骤相似。上述步骤的示意图见图S5。
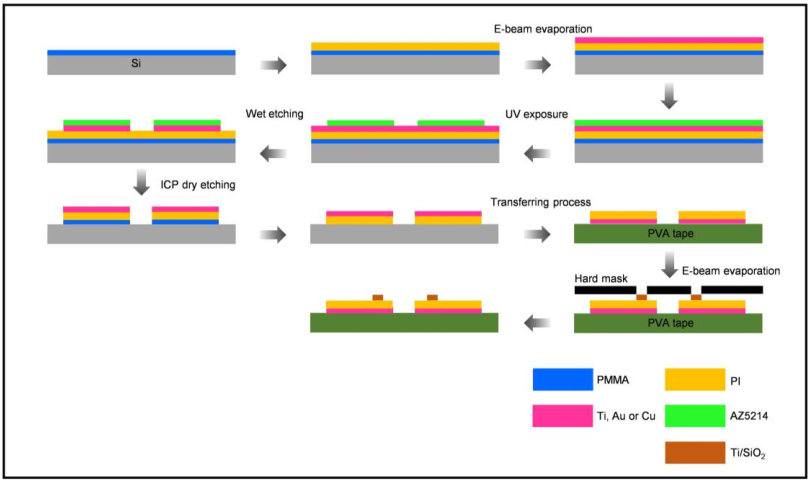
在金属/PI中制备3D介观表面始于在硅晶圆上旋涂一层PMMA,随后再旋涂形成均匀的PI覆盖层(厚度2.7 ~ 12 μm)。通过电子束蒸发在PI上沉积一层薄的金属层(例如,Ti、Au或Cu,厚度20 ~ 600 nm),随后进行光刻和蚀刻工艺,定义了金属中的2D图案。后续步骤,包括ICP蚀刻、图案化Ti/SiO₂键合位点和在基底上的3D组装,与上述步骤相似。步骤示意图见图S6。
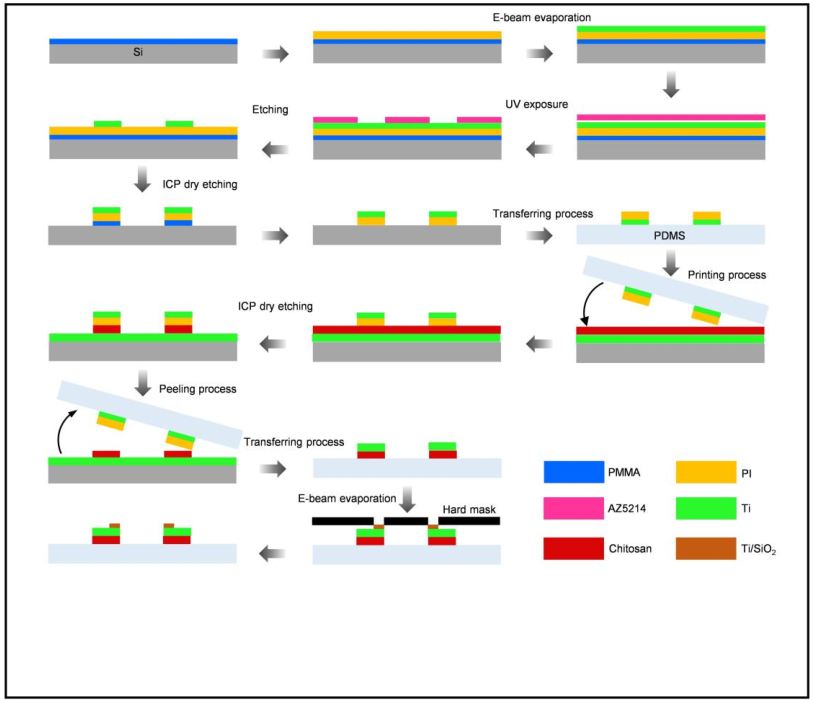
在金属/壳聚糖中制备3D介观表面始于通过上述旋涂、沉积、光刻和ICP蚀刻制备Ti/PI硬掩模,随后将硬掩模转印到一片聚二甲基硅氧烷(PDMS,约1 mm厚)上。在硅晶片上沉积一层钛,在钛上旋涂一层几丁质(厚度约5微米),随后通过印刷工艺将硬掩模层压到几丁质上,并通过感应耦合等离子体(ICP)刻蚀定义了几丁质的二维图案。借助一片聚二甲基硅氧烷(PDMS)剥离硬掩模,并使用超薄刮刀将几丁质转印到另一片PDMS上,完成了二维前驱体结构的制备。后续步骤,包括图案化钛/二氧化硅键合点以及在基底上进行三维组装,与上述描述类似。步骤示意图见图S7。需要注意的是,几丁质容易溶胀,上述制备过程可以避免水溶液(如光刻胶、刻蚀液等)与几丁质接触。
在激光诱导石墨烯(LIG)/聚酰亚胺(PI)中制备三维细观表面的过程始于在硅晶片上旋涂一层薄薄的聚甲基丙烯酸甲酯(PMMA),随后经过三次旋涂形成一层厚厚的聚酰亚胺外涂层(厚度约30微米)。通过电子束蒸发在聚酰亚胺上沉积一层薄薄的钛(厚度约100纳米),随后经过光刻、湿法刻蚀和感应耦合等离子体(ICP)刻蚀工艺定义了二维图案。在ICP工艺后去除顶部的钛层,将二维前驱体结构从硅晶片转移到一片PDMS上,随后通过激光扫描在目标区域诱导生成石墨烯,从而完成了二维前驱体的制备。将二维前驱体层压到预拉伸的硅基底上,并点涂商业粘合剂(Superglue,Gorilla Glue公司),仅在键合点处形成牢固的界面。释放预拉伸力将二维前驱体转化为目标三维细观结构。
在钛/SU-8中制备三维细观表面的过程始于在硅晶片上沉积一层铜(厚度约500纳米),随后旋涂一层SU-8光刻胶(约10微米)并进行紫外曝光,生成图案化的SU-8结构。使用电子束蒸发沉积一层薄薄的钛(厚度约100纳米),结合光刻和剥离工艺,形成了二维前驱体结构。刻蚀铜层使得可以将二维前驱体结构转印到一片聚乙烯醇(PVA)胶带上。剩余步骤,包括图案化钛/二氧化硅键合点以及在基底上进行三维组装,与上述描述类似。
A2. 基于应变限制框架的自支撑三维细观表面制造方法。
自支撑三维细观表面的制备始于制造由钛/聚酰亚胺制成的圆形应变限制框架,遵循上述类似的工艺。将制造好的应变限制框架转印到一片PDMS上,然后在PDMS顶部旋涂一层聚酰亚胺(不加热),使得一层薄薄的聚酰亚胺溶液停留在框架上。借助定制的探针定位系统将框架放置到三维细观结构的键合点顶部,随后在80°C下加热20分钟,实现了框架与键合点之间的牢固粘附。在氢氟酸(HF)中浸泡2分钟以去除钛/二氧化硅层,完成了隔离过程。步骤示意图见图S22。值得注意的是,该方法不仅适用于使用圆形应变限制框架隔离对称细观表面,也适用于通过策略性地设计应变限制框架的几何形状来形成自支撑的非对称细观表面(图S23F和G)。
A3. 三维适形心脏电子器件的制造方法与测量。
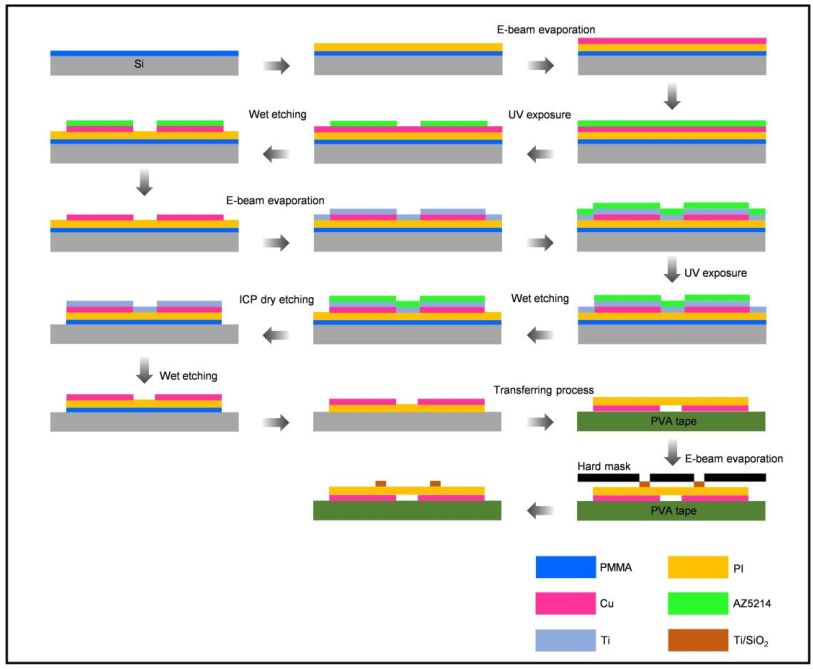
三维适形心脏电子器件的制备始于在硅晶片上旋涂聚甲基丙烯酸甲酯(PMMA)和聚酰亚胺(约10微米)层。金属沉积、光刻和剥离工艺使得能够形成图案化的二维电路(铜,厚度约250纳米)。然后,在聚酰亚胺和铜层上沉积一层薄薄的钛(厚度约30纳米),经过光刻图案化和湿法刻蚀后,用作感应耦合等离子体(ICP)刻蚀的硬掩模。用氢氟酸(HF)处理去除残留的钛层,得到了具有微格和图案化电路的二维前驱体结构。步骤示意图见图S8。后续步骤与上述描述类似,包括在一片聚乙烯醇(PVA)胶带上制作键合位点,将PVA胶带层压到预拉伸基底上,并通过选择性共价键使二维前驱体与基底连接。借助定制的探针定位系统,将miniLED(0402,TOGIALED,中国)阵列、负温度系数(NTC)芯片热敏电阻(0201,TDK,日本)阵列和一个电阻加热器(0402,4700 Ω,QILEXIN,中国)放置到二维前驱体上,并将其焊接到目标电极,完成了电子元件的集成。缓慢释放基底的预应变,完成了半球形电子器件的三维组装过程。通过激光切割制作一个由十个蛇形部件和十个弧形段组成的应变限制框架,并按照上述隔离方法的步骤进行操作,得到了一个自支撑的三维适形心脏电子器件。
在体外测试中,该器件通过自适应适形变形包裹在猪心的心尖区域。使用低压直流电源(XYS3580,SINILINK,中国)为miniLED和加热器供电,并使用多通道万用表(34465A,Keysight,美国)记录芯片热敏电阻的电阻变化,该变化可根据其温度-电阻转换关系解读为温度变化。此外,使用红外热像仪在miniLED阵列照明10分钟后捕获器件的温度分布,显示了微格中电路网络的局部散热情况。
A4. 三维电子细胞支架的制造方法。
聚酰亚胺(PI)/金(Au)/聚酰亚胺(PI)三维电子细胞支架的制备始于在硅晶片上旋涂一层聚甲基丙烯酸甲酯(PMMA),随后再次旋涂以形成均匀的聚酰亚胺外涂层(厚度约3.5微米)。通过光刻和刻蚀由电子束蒸镀沉积的薄层铬/金(厚度约10纳米/500纳米),定义了铬/金层的二维图案。旋涂另一层聚酰亚胺(厚度约3.5微米)形成了顶部封装层。通过光刻和湿法刻蚀对沉积在封装聚酰亚胺层顶部的薄层钛(厚度约35纳米)进行图案化,定义了用于感应耦合等离子体(ICP)刻蚀的硬掩模。在ICP刻蚀后去除顶部的钛层,完成了电子细胞支架的二维前驱体结构的制备。步骤示意图见图S9。在预拉伸基底上进行三维组装的后续步骤与上述描述类似。三维组装过程后,通过圆形应变限制框架将电子细胞支架从弹性基底上隔离出来,然后倒置放置在一个带有通孔的聚二甲基硅氧烷(PDMS,厚度约3毫米)平台上。
A5. 电子细胞支架上的细胞培养、细胞形态观察和阻抗测量方法
人视网膜色素上皮(RPE)细胞购自国家细胞系资源基础设施(NICR,中国上海)。使用添加了10%胎牛血清(FBS,Gibco)和1%青霉素-链霉素(PS,Invitrogen)的杜尔贝科改良 Eagle 培养基/Nutrient Mixture F-12(DMEM/F12,Gibco)作为细胞培养基。在每个电子细胞支架(即每个样品)上种植个细胞,在37°C、5% CO2的培养箱中培养,每两天更换一次培养基。
为了便于观察电子支架上的三维细胞形态,样品在培养15天后用4%甲醛在4°C下固定4小时,然后用0.01 PBS清洗三次后,在室温下用0.1% Triton-X-100孵育5分钟以使细胞膜通透,随后在室温下用含1% BSA的PBS封闭1小时。去除封闭试剂后,样品在室温下用F-肌动蛋白标记物罗丹明-鬼笔环肽(Invitrogen,美国)染色40分钟,然后用4’, 6-二脒基-2-苯基吲哚(DAPI,Invitrogen,美国)复染10分钟。通过光片显微镜(Lightsheet Z.1,ZEISS,德国)获得了电子细胞支架上RPE细胞的荧光染色图像。
采用扫描电子显微镜(SEM,Merlin,ZEISS,德国)来表征电子支架曲面上RPE细胞层的整体均匀性和电极覆盖情况。通常,使用2.5%戊二醛在4°C下固定样品2小时,然后依次使用不同浓度的乙醇(30%、50%、60%、70%、80%、90%、95%和100%)进行脱水,随后浸入叔丁醇中并在-20°C下冷冻过夜。冷冻样品用真空冷冻干燥机(Sihuan,中国)干燥。所有样品在SEM观察前都溅镀了一层纳米级的金层(厚度约10纳米)。
电子细胞支架上三种类型电极的阻抗是通过电感-电容-电阻(LCR)表(E4980A,Keysight,美国)在每个通道进行开路和短路校准后测量的。对于每个样品,在电刺激(50 mV振幅的交流电压,频率范围为20 Hz至1 MHz)下测量阻抗变化。在研究胰蛋白酶处理时间对阻抗的影响时,分别测试了四个样品。
B1. 有限元分析 (FEA)
三维有限元分析可以预测采用微格设计的三维细观表面的后屈曲响应和最大主应变分布。微格薄膜和应变限制框架采用四节点壳单元(S4R),弹性基底采用八节点三维实体单元(C3D8R)。使用商业软件(ABAQUS)并通过细化网格确保了计算精度。对金属、硅、SU8和PI采用了线弹性本构模型,其中弹性模量(Eo)和泊松比(v)分别为:金的EAu = 70 GPa 和 ;钛的ETi = 102 GPa 和 ;铜的ECu = 119 GPa 和 ;硅的ESi = 130 GPa 和 ;SU8的ESU8 = 4.02 GPa 和 ;以及PI的EPl = 2.5 GPa 和 。弹性基底采用了Mooney-Rivlin本构模型(Esubstrate = 166 kPa 和 )。进行了线性屈曲分析以确定微格薄膜的临界屈曲应变和最低阶屈曲模态,然后将其作为初始缺陷引入后屈曲分析。考虑到高度的弯曲/扭转变形和平动/转动运动,在后屈曲分析中考虑了几何非线性。
B2. 离散介导的变形机制及微格薄膜的手性控制。
基于微格设计策略的薄膜所具有的局部离散而全局连续的几何特征,实现了一种独特的离散介导的变形机制。以圆形微薄膜(图S11)为例,对于固体或微格密集分布的薄膜,涉及扭转变形的手性模式在能量上更有利,因为对称变形会引发非常明显的应力集中(图S11B和C)。相比之下,当微格足够稀疏和多孔,能够容纳带状结构的弯曲主导变形时,对称模式引起的应变能低于手性模式。
利用离散介导的变形机制,提出了一种基于孔隙率调控的方法来主动控制内部柱体的扭转方向,为制备具有可控手性的三维介观表面提供了一条途径。此处,圆形微薄膜中两个键合点之间中间区域略微降低的孔隙率打破了几何对称性,导致右手扭转模式和左手扭转模式之间存在能量差(图S12)。此外,基于这种孔隙率调控方法,展示了两种受曼陀罗花和栀子花启发的不同介观表面(图1D)。特别是,左侧的介观表面类似于曼陀罗花,分别在外围区域呈现左手手性,在内围区域呈现右手手性。通过调整局部孔隙率,我们可以使外围和内围区域实现相同类型的手性(图S13)。
B3. 三维对称介观表面逆向设计的解析模型。
在逆向设计框架中,采用了三角形晶格设计,而不是简单的带圆孔的胞元设计,因为前者在减轻应力集中(尤其是在高孔隙率情况下)以及对复杂形状边缘的出色适应性方面具有显著优势。具体来说,以具有等边三角形晶格和圆孔的周期性胞元设计为例,我们基于线弹性假设数值计算了不同相对密度下的应力集中因子(Kt)。如图S1A ~ C所示,在较小相对密度下(例如 ),带圆孔的胞元设计的应力集中因子(Kt)超过3.38,而三角形晶格的Kt则低于1.53()。由于较大的应力集中因子在组装由脆性材料(例如,断裂应变约2%的单晶硅)制成的三维介观表面时容易引发断裂失效,因此在三维介观表面的逆向设计中,应力集中因子应保持足够小。在 的情况下,带圆孔的胞元设计的无量纲有效模量(E/E0)范围在0.19到0.61之间。如此狭窄的模量控制范围无法满足本工作中研究的许多三维复杂介观表面的曲率编程要求。相比之下,三角形晶格提供了非常宽的无量纲有效模量范围(例如,相对密度从0.01到0.25时,0.0034 < E/E0 < 0.11),并且理论上可达到的有效模量没有下限,这尤其适用于三维介观表面的曲率编程。在对各种曲线边缘的适应性方面,具有三角形单元的微格设计相对于带圆孔的胞元设计显示出明显优势,因为三角形单元中三个微带(microribbons)的边长和倾斜角可以方便地调整以适应复杂的边界形状。不同的是,对于在局部区域具有尖锐凸起和/或凹陷特征的边界,具有相同孔尺寸的正方形单元会引起明显的锯齿状特征。
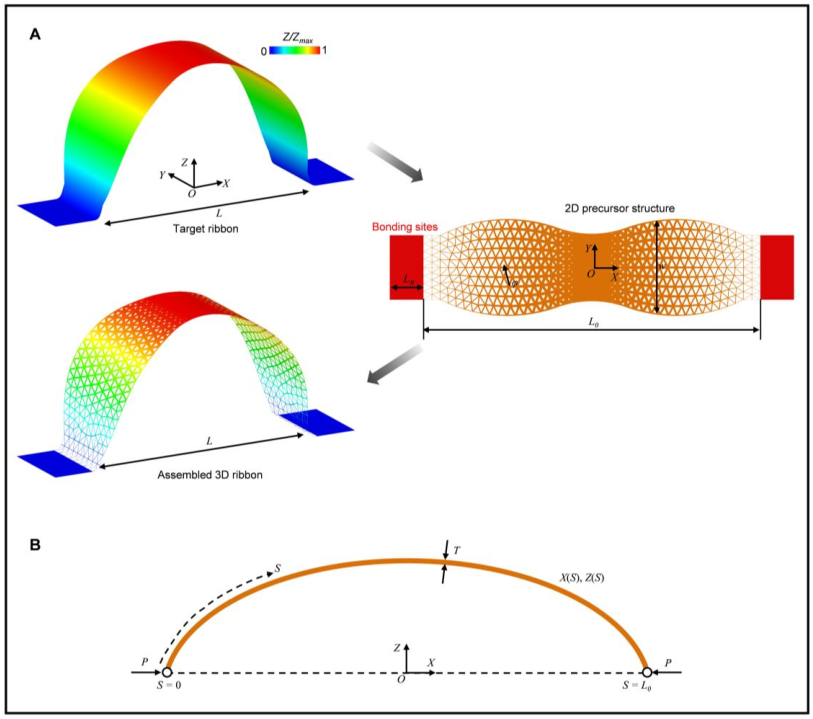
在组装三维结构的过程中,材料应变通常非常小(例如<1%),因此材料(例如PI、SU-8和Si)通常表现出线弹性行为。因此在以下分析中采用线弹性材料模型。为了逆向设计具有轴线(即X(S)和Z(S))的目标带状结构(弧坐标S)(图S14A),在机械引导的3D组装中利用微格策略来生成初始二维前驱体。由于三角形微格的有效模量与相对密度成正比,弯曲刚度与相对密度和带宽度成正比,即:
其中 和 w(S) 分别是孔隙率和横截面宽度。考虑一个具有恒定横截面厚度T、承受载荷P的简支梁带(图 S14B),弯矩的静态平衡给出:
其中 K(S) 是轴线的曲率。利用式 (S1) 和 (S2),可以得到孔隙率为:
其中 是具有最低孔隙率截面的弧坐标。由于轴向伸长可忽略不计,基底的预应变 可以写为:
其中 和 分别是目标三维梁带的弧长和键合点的长度(图 S14)。值得注意的是,基于线弹性材料模型的假设,生成的孔隙率 和预应变 与材料参数无关。这个基于梁理论的模型主要适用于具有正曲率()的弯曲二维梁带的逆向设计,但可以通过引入额外的特征(例如,在关键位置施加集中力或设置键合点)扩展到同时具有正负曲率的情况。基于该解析模型,梁的孔隙率分布可以直接从母线坐标获得,这种方法直接且非常便于实现。此外,解析模型清晰地展示了各种设计参数(例如孔隙率、宽度、压缩应变和模量)对形状编程的影响,这有助于理解微格设计策略。
基于这个逆向设计模型,生成了两个具有预定对称和不对称图案的梁带细观结构,其轴线的实验测量结果与设计目标非常吻合(图 S15)。这些梁带的轴线坐标(单位:mm)为:
大多数轴对称三维曲面是不可展的,因此,无法直接从几何连续的二维薄膜组装而成,而不涉及大的薄膜应变(例如,>5%,这对于大多数无机电子材料是无法承受的)。在此,我们引入一种基于离散化的近似方法,以允许在轴对称曲面的逆向设计中使用基于梁理论的模型。该方法将具有母线(即 和 )的目标曲面均匀地划分为 n 个子曲面(图 S17),每个子曲面可被视为一个具有非均匀宽度的带状结构,其宽度由下式给出:
然后我们可以使用公式 (S3) 和 (S4) 给出目标子曲面的孔隙率分布 和预应变 。为了定量描述这种近似所产生的误差,我们将子曲面和二维弯曲带状结构投影到 XY 平面上,并将两条边之间的最大偏差(图 S17B)视为误差 ,由下式给出:
使用该近似方法和微格策略,展示了一系列轴对称三维曲面,其有限元分析结果、实验结果和设计目标之间具有高度的吻合度。这些细观曲面母线的坐标列举如下。坐标(即 X 和 Z)单位为毫米。
图 1C:
图 2A:
图 2B:
图 2C:
图 2D:
图 2E:
图2F:
图2G:
图S18A:
图S18D:
图S18E:
图 S18F:
图 S18G:
图 S18H:
图 S18I:
B4. 独立式3D微结构形状固定程度的分析。
采用应变限制框架来约束键合点的运动,从而允许从块状弹性基底中分离出3D微结构。在隔离过程中,3D微结构倾向于恢复其二维无应力状态,从而对变应限制框架施加力。因此,应变限制框架中可能发生翘曲变形,并导致分离的3D微结构的几何变化。如图S24A所示,应变限制框架的翘曲比()可表示为
其中,、、 分别是应变限制框架的半径、面积和Z方向位移。较大的翘曲比对应变限制框架的显著变形,表明形状固定程度较差。力学建模表明刚度比 是影响形状固定的主导参数,且翘曲比表现出如下缩放关系:
基于有限元分析结果,其中 、、 和 分别是3D微结构和应变限制框架的材料模量和薄膜厚度; 和 是无量纲参数,取决于3D微结构的几何形状。对于半椭球体帽状微结构(图24A)和球形帽状微结构(图S24B),该缩放定律(式(S25))很好地捕捉了其刚度比与翘曲比之间的非线性关系,与有限元结果具有高度一致性。该缩放定律可为独立式3D微结构提供有用的设计指南,例如优化应变限制框架厚度以获得所需的形状固定程度。此外,图21中间的SEM图像显示应变限制框架与微晶格微结构之间具有清晰的边界,表明这种基于附加框架的隔离方法在技术上不会直接影响3D微结构中的微晶格。
B5. 用于3D微结构逆设计的基于点云机器学习模型。
最近,机器学习(ML)方法已被开发用于复杂系统的非直观设计应用,包括功能材料和器件(43–47)。本工作中,开发了基于点云的机器学习模型,用于逆设计目标3D曲面微结构的前驱体结构(即二维图案轮廓和孔隙率分布)。需要注意的是,有三种代表性的深度学习架构可用于存储和处理3D几何数据,包括体积卷积神经网络(VCNN)、多视图CNN和点云基CNN。VCNN将3D卷积神经网络应用于体素化形状,基于域空间中的精细划分,其中计算成本主要取决于体素分辨率(即域中最小立方体的尺寸)(43, 48)。基于微晶格设计的3D曲面微结构通常表现出超薄特征(即膜厚度远小于横向尺寸),因此在域内占据体积的比例非常低。因此,低曲率3D曲面微结构的体积表示需要非常高的体素分辨率,这将显著增加数据量和计算复杂性。多视图CNN将三维形状编码为来自多个视角的二维图像集合,然后采用精心设计的二维图像CNN来处理数据。多视图数据表示需要使用不同的外部摄像机来渲染三维形状的多个视图(例如,类蚂蚁微结构需要>10张图像),这导致数据存储和数据集调用的复杂性(49)。此外,二维图像缺乏深度信息,这可能导致复杂微结构的局部曲率特征丢失。相反,点云非常简单,只需包含一组点即可表示三维微结构和基于微晶格设计的二维前驱结构(36)。三维弯曲微结构的前驱节点集自然可以通过基于点云的框架直接表示。与体素和多视图方法相比,基于点云的方法不涉及域离散化或从多个投影视角进行图像采集,这表明数据量小得多。此外,三维复杂微结构的点云可以很容易地通过商用三维激光扫描设备(例如,微轮廓仪)获取。
第一步是生成用于训练基于点云的ML模型的数据集,这涉及确定二维图案轮廓、用规定的微晶格对二维图案进行网格划分、使用FEA通过受控屈曲计算组装的3D构型,以及从组装的3D丝带中提取节点点的坐标(图S28)。考虑到计算成本,这里采用了沿丝带长度方向的十一个边缘节点。具体来说,轮廓(图S28A中由边缘1和2表示)的坐标可以由两条起始边(和 对于边缘1,和 对于边缘2)、两个半径(和)以及分割边缘与X方向之间的二十个角度(,;)来确定。除了两个起始点之外,轮廓中特征点的坐标可以由下式给出:
一旦轮廓确定,二维前驱结构就用规定的微晶格图案进行网格划分,其中两条边缘中相邻特征点的连线被三等分(图S28B)。两条边缘之间由两对相邻特征点包围的区域被划分为六个三角形单元,共享相同的孔隙率(,)。在平面加载条件下,位移分量和旋转角分别应用于顶部和底部边缘(图S28C),以将二维前驱结构转换为三维丝带。为了简化加载条件,顶部边缘的位移和面内旋转被设为零,底部边缘给定规定值。从组装的3D微结构中提取特征点的3D坐标(和,;),如图S28D所示。
考虑到图3和图S37中目标表面的几何特征,应规定关键几何参数的优化范围。例如,二维前驱结构轮廓中的关键参数应满足:
此外,为避免两条边缘之间的相交,采用样条函数拟合每条边缘上的特征点,并通过数值计算得到它们的交点,从而识别存在相交的二维轮廓的分布。采用分段线性函数来模拟孔隙率分布:
其中 ,且 和 分别是区域 处三角形单元的孔隙率。然后,通过改变关键设计参数,可以建立包含22个特征点的轮廓子数据集和包含200个数据点的孔隙率分布子数据集,用于2D前驱结构。从两个子数据集中随机选择轮廓和孔隙率,允许构建2D前驱结构。通过Python生成有限元分析的输入文件,以计算丝带的3D构型(图S29)。在构建的数据集中,每个数据点由2D轮廓中特征点的坐标和孔隙率,以及组装丝带的对应3D坐标组成。每个数据点中的坐标通过2D前驱结构的最大边缘长度进行归一化。图S30展示了构造数据集中的十八个示例。注意,数据增强用于扩展数据库。每个2D前驱结构可以镜像和旋转以获得三个新的前驱结构,并且不同的3D配置可以在五个不同的加载水平(例如,25%、50%、75%、100%加载位移和20度旋转)下实现,导致20倍的数据增强(图S31)。
第二步是构建、训练和测试基于点云的ML模型。该ML模型的构建和训练在PyTorch平台上完成,该平台提供了一个用于人工神经网络(ANN)的Python接口。使用顺序ANN模型,其中包括一个输入层(),大小为 ;一个输出层();以及三个大小为 的全连接隐藏层(图S32)。迭代更新神经元权重和偏置可以确保输出 通过最小化
其中 是训练数据点的数量。80%和20%的所有数据点分别用于训练和测试。全连接隐藏层的数量选择为5以确保计算准确性,训练epoch的最大数量设置为500(在超参数优化过程之后)。所有隐藏层均使用非线性ReLU(修正线性单元)函数激活,基于梯度的下降器使用Adam(自适应矩估计)优化器。学习率在训练过程中基于调度器(StepLR, )自动更新,其中 分别是更新学习率、初始学习率、学习率衰减的乘法因子(0.5)和迭代次数。考虑到计算效率,该网络的批量大小被设定为16。当测试数据集的损失函数收敛时,所开发的点云机器学习模型通过评估,可用于三维复杂介表面的逆向设计。
点云机器学习模型基于由二维和三维带状介表面组成的数据集建立。对于三维复杂介表面的逆向设计,需要引入策略性离散化策略,将问题简化为一系列二维丝带的逆向设计,如主文第3节所述。注意,梁基解析方法在本工作的逆向设计框架中与点云机器学习方法互补。解析框架也可用于增强机器学习方法。一种可能的实现路径是利用解析模型快速生成大量三维对称介表面的补充数据集,以扩展现有数据库。用扩展后的数据集训练计算模型后,可实现三维对称介表面的逆向设计。
B6. 嵌入PI框架的异质基底逆向设计的解析模型
在复杂三维介表面的逆向设计中(例如,图3),介表面被离散为多个丝带组件。由于屈曲变形过程中轴向伸长/压缩可忽略,每个丝带组件通常需要不同的加载条件,这对弹性前驱体的设计提出了巨大挑战。为简化此问题,每个丝带组件组装在单独的定制异质基底上,该基底包含嵌入弹性矩阵的PI框架(由六根直丝带和四对弧形丝带组成)。当双向预拉伸时,此类异质基底除了压缩外,还能为二维前驱体提供所需的旋转加载。如图S33A和B所示,通过调整PI框架的几何参数,可对异质基底进行逆向设计,以在每个丝带组件上提供所需的载荷。
在图S33中,和是六根丝带的长度;是三个区域中弧形丝带的半径;和是三个区域中弧形丝带的圆心角;和是相交弯曲丝带与其余丝带的宽度。
假设弹性矩阵的模量远低于PI(例如,硅胶材料的3 kPa),且PI框架的轴不可延伸,则可建立PI框架的几何模型。然后,变形构型(图S33B)中的和可表示为:
在逆向设计过程中,丝带组件的两个粘合位点可附着到点“”和点“”,因此相对于点“”的点“”处的加载条件是、和,分别表示和方向的位移以及旋转角。当PI框架中的弯曲丝带拉直时,应满足点“”处的加载条件,此时和应满足以下几何关系:
在逆向设计过程中,丝带组件的两个键合位点可连接到点“”和点“”,因此点“”相对于点“”的加载条件是、和,分别表示和方向的位移以及旋转角。当PI框架中的弯曲丝带变直时,点“”处的加载条件应满足,此时和应满足以下几何关系:
其中是丝带组件两个键合位点之间的距离。将式(S31)代入式(S30),并结合的假设,PI框架的关键几何参数可表示为:
施加到点“”“”的拉伸位移()可表示为:
为确保相交区域的四条弯曲丝带能被充分拉直,四条丝带的宽度应小于其他丝带的宽度。本研究中,采用。给定和的参数,基底设计可完成,即和可根据式(S32)和(S33)计算。上述模型为图S33C和D所示的所需加载条件下的异质基底逆向设计提供了有用的指导。基于该模型获得了四个随机选择的加载条件(图S33C中标记为①、②、③和④),并且所有定制的几何参数(图S33D)都可以通过解析获得。
B7. 三维电子细胞支架的设计
电子细胞支架由微晶格框架(PI,聚酰亚胺)、38,276 个微三角形、59,542 个微梁、蛇形互连(Au,金)以及五对电极(标记为“I”、“II”和“III”,从外到内)组成,用于阻抗生物传感(图 4G 和 H)。为提高对 RPE(视网膜色素上皮)细胞活性的灵敏度,每对电极包含一个探测(“D”)电极(7 或 9 个直径 ~40 μm 的圆形微电极)和一个更大的对置(“C”)电极(图 S43)。为确保电极与基底之间的良好电互连,在折痕区域添加了两个“S”形互连(图 S43)。基于所提出的形状固定方法,独立的 3D 电子细胞支架可通过圆形应变限制框架实现,便于细胞在 6 孔板培养介质中的生长。
B8. 微晶格设计策略与现有局部刚度控制 3D 组装方法的比较
局部刚度控制是编程 3D 曲面曲率分布的通用途径,厚度工程(21, 22)和异质集成(23-25)是先前报道的两种通过局部刚度控制实现可控 3D 组装的代表性策略。与这些现有策略相比,本研究提出的微晶格设计策略在实现几何、适用材料和组装 3D 表面的长度尺度方面具有重要优势。现有策略的详细比较如下:
(1) 厚度工程策略(21, 22)通过改变二维前驱体结构的薄膜厚度分布来调节弯曲刚度,这对实现电子材料(如聚合物和金属)的厚度梯度精确控制提出了巨大挑战。例如,参考文献(2)基于先进的灰度光刻技术仅能实现 ~1 μm 的面外厚度分辨率,其实现的最小 3D 曲面在实验中仅为直径 ~4 mm、横向尺寸 ~9 mm 的简单半球形。相比之下,基于梯度厚度设计的 2D 前驱体结构的可实现横向尺寸仅为 ~50 μm(考虑 1 μm 的条带宽度精度和 ~2 μm 的单元尺寸,基于成熟的 UV 光刻技术)。若采用电子束光刻技术,基于梯度纳米厚度设计的 2D 前驱体结构的横向尺寸可进一步缩小至 ~5 μm(考虑 ~100 nm 的条带宽度精度和 ~200 nm 的单元尺寸)(50)。
(2) 异质集成策略(23-25)主要依赖空间变化材料特性的二维前驱体结构设计(如模量(23)、热膨胀/溶胀系数(24, 25)),以在外部刺激(如温度、湿度和压力)下实现曲率编程。由于材料应变相对较大,这些策略可实现多种 3D 形状,但主要适用于聚合物材料(如液晶弹性体(LCE)、磁弹性体和水凝胶),与传统微制造技术(如光刻、蚀刻和蒸发)兼容性较差。由于活性材料在 3D 组装过程中通常承受较大的固有应变,这些策略通常不适用于无机电子材料(如金属和硅)。基于异质集成策略(23-25)报道的实现的最小 3D 封闭微曲面的横向尺寸约为 1 cm。
(3) 与先前的局部刚度控制策略相比,本研究提出的微晶格设计策略对应于一种受启发的创新刚度控制途径生物三维多孔结构。这项工作还开发了一种基于点云的机器学习方法,作为非对称复杂三维微表面逆向设计的新工具。从技术角度来看,基于晶格的设计策略绕过了梯度厚度分布精细控制的挑战,并允许实现具有显著减小横向尺寸的功能复杂的微表面。我们工作中的实验演示包括不同材料(例如单晶硅、金属、几丁质、聚酰亚胺和激光诱导石墨烯)中的30多种不同弯曲微表面,特征尺寸范围从2.7 μm到30 μm(薄膜厚度)以及约250 μm到30 mm(横向尺寸)。此外,基于晶格设计的逆向设计框架涉及选定粘结位点处前驱体结构的平面内加载的三维组装。二维到三维前驱体结构和平面内加载的性质对可获得的3D几何形状的范围设置了某些限制。特别是,目标3D微表面应该是可展开的,或者它可以被划分为一组可展开的3D子表面(例如图2A中的半球形微表面);否则,使用所提出的方法将无法实现。
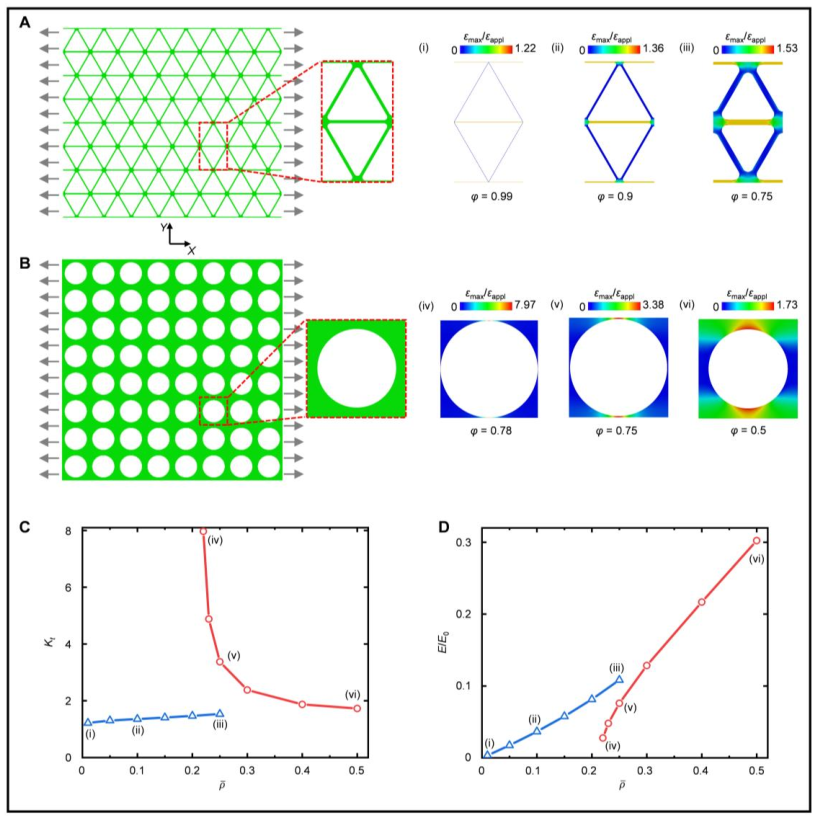
图S1. 周期性蜂窝设计与三角形晶格、圆形孔洞的应力集中比较。(A)三角形晶格周期性蜂窝设计的代表性体积单元(RVE),以及三种不同孔隙率()下最大主应变()与应用应变()之比的等值线。(B)圆形孔洞周期性蜂窝设计的RVE,以及三种不同孔隙率()下应变比()的等值线。(C)应力集中系数()随三角形晶格蜂窝设计(带三角形点的蓝线)和圆形孔洞蜂窝设计(带圆点的红线)相对密度()的变化关系。(D)有效模量()沿水平方向与材料模量()的比值随三角形晶格蜂窝设计(带三角形点的蓝线)和圆形孔洞蜂窝设计(带圆点的红线)相对密度()的变化关系。本图中的模拟结果基于线性材料模型和无穷小变形获得。三角形晶格中的圆角半径固定为有限元分析中丝带宽度相同。
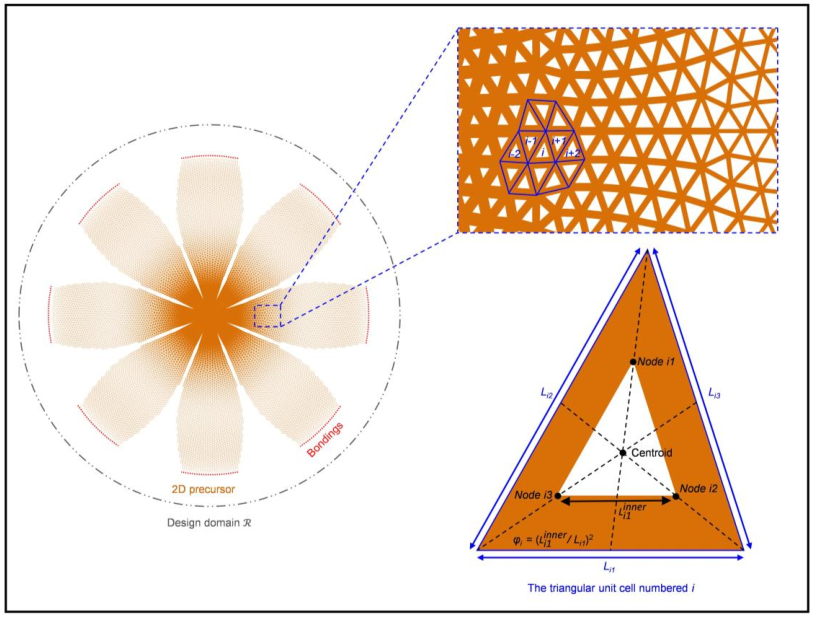
图S2. 二维前驱体结构仿生微晶格设计策略的示意图。编号为的三角形单元胞的孔隙率可由给出,其中和分别为三角形单元胞和三角形孔的边长。
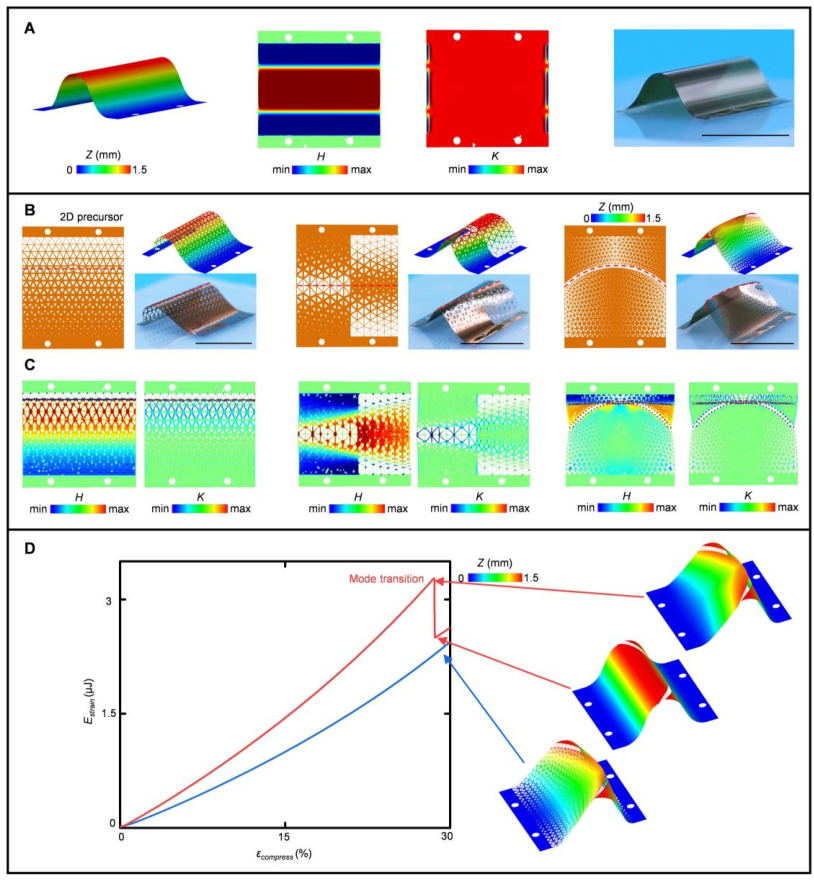
图S3. 由不同微晶格设计的二维前驱体转化而来的三维介表面的变形和曲率分布。(A)有限元分析结果(左)、平均曲率()分布(中左)、高斯曲率()分布(中右)以及实验结果(右)(无孔隙的弯曲介表面)。(B)二维前驱体、有限元分析和由具有不同微晶格设计的二维方形前驱体转化而来的三个弯曲介表面的实验结果。(C)与图S3B对应的三个弯曲介表面的平均曲率分布(左)和高斯曲率分布(右)。(D)含有“C”形高孔隙率区域的两个介表面的应变能曲线和变形模式。在方形前驱体的其他区域引入微晶格图案可以提高结构的稳定性,以避免在组装过程中出现不期望的模式转变。是施加在二维前驱体结构上的压缩应变。比例尺:5 mm。
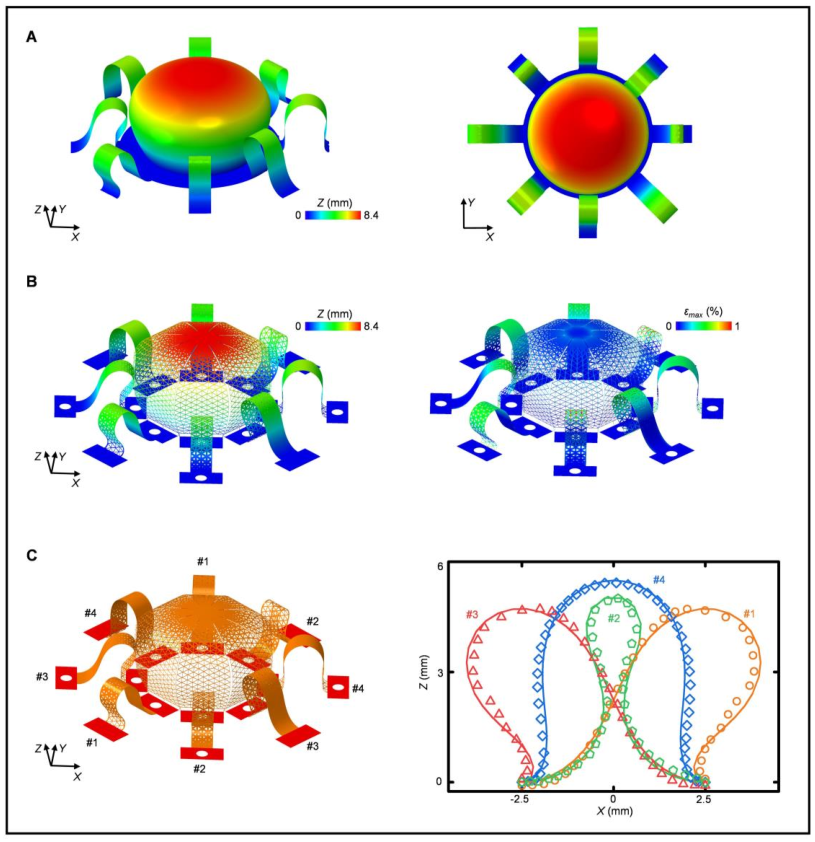
图S4. 类章鱼介表面的目标几何形状、有限元分析和实验结果。(A)带有高度轮廓的目标类章鱼介表面。(B)逆设计介表面的高度和最大主应变分布。(C)章鱼四个不同触手的目标坐标(线)与实验结果(点)的比较。
图S5. 基于剥离工艺制备Si层置于PI层上的二维前驱体结构的流程。
图S6. 制备金属层置于PI层上的二维前驱体结构的流程。
图S7. 制备Ti层置于壳聚糖层上的二维前驱体结构的流程。
图S8. 制备三维可贴合心脏电子器件的二维前驱体结构的流程。
图S9. 制备金(Au)层被两层聚酰亚胺(PI)层夹在中间的二维前驱体结构的流程。
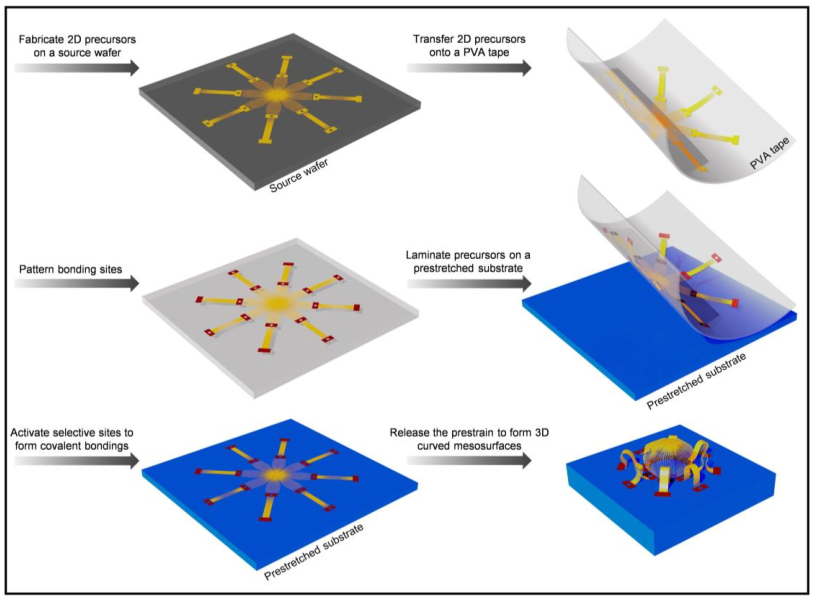
图 S10. 受控屈曲引导下三维章鱼状介观表面组装过程的示意图。
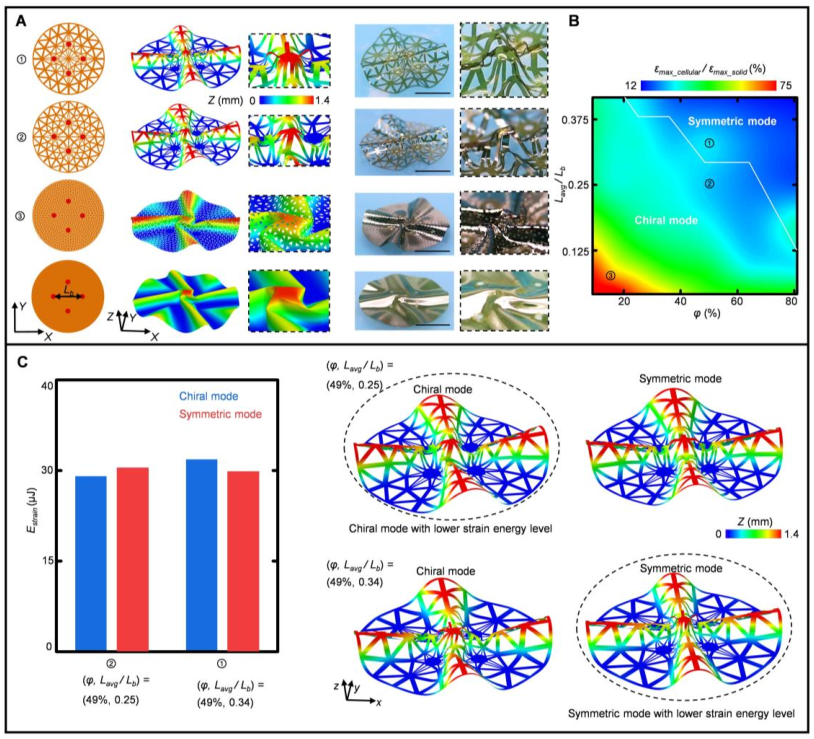
图 S11. 具有四个内部键合位点的圆形前驱体结构的变形行为。(A)四个不同孔隙率的弯曲介观表面的二维前驱体(左)、有限元分析(中间)和实验结果(右)。(B)应变比()随长度比()和孔隙率变化的等高线图, 和 分别为带和不带微晶格设计的三维弯曲介观表面的最大主应变。 和 分别是三角形单元的平均边长和两对相对键合位点之间的距离。在实际应用感兴趣的参数范围内,三维弯曲介观表面会经历两种不同的变形模式(即对称和反手性)。(C)两种弯曲介观表面(在图 S11A 和 B 中分别标记为①和②)在不同变形模式下应变能(左)和三维构型的比较。两种模式之间应变能的差异表明,介观表面①的对称模式和介观表面②的反手性模式在能量上都是有利的。比例尺:5 mm。
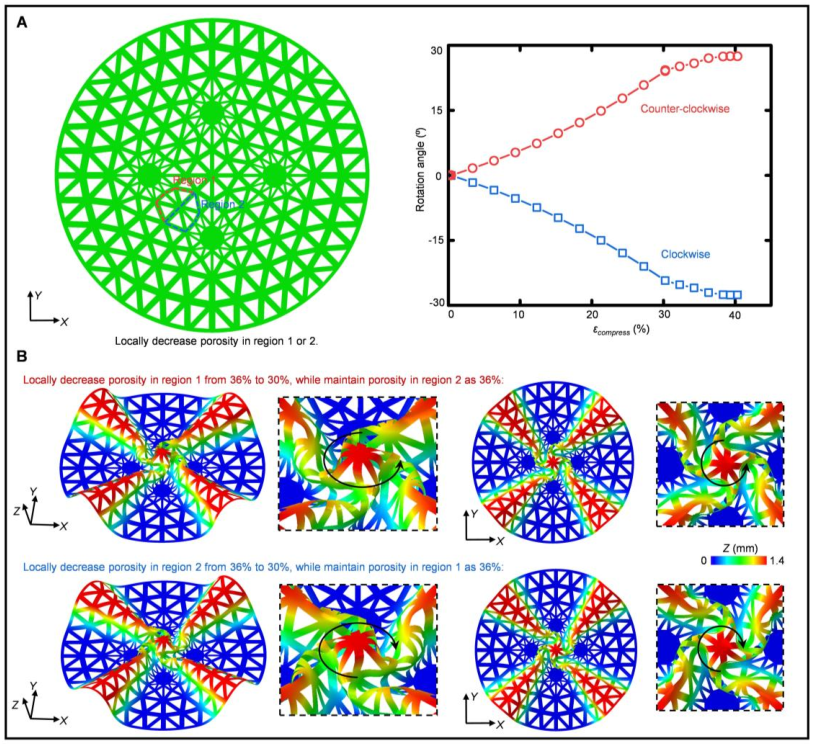
图 S12. 通过破坏对称性控制三维弯曲介观表面的手性。(A)两个弯曲介观表面的中心区域旋转角随压缩应变的变化关系,这两个介观表面分别在区域1(红色)或区域2(蓝色)中孔隙率降低(从36%降至30%)。(B)图(A)中两个弯曲介观表面的三维构型及手性。
图S13. 两种具有可编程手性的花状三维介观表面的设计。(A)两种不同手性的“曼陀罗草”(datura stramonium)状介观表面的二维前驱体(左)、有限元分析(FEA)结果(中间)以及平均曲率和高斯曲率的分布(右)。(B)两种不同手性的“栀子花”(gardenia jasminoides ellis)状介观表面的类似结果。
图S14. 基于微晶格策略的三维丝带逆设计的示意图(A)及相应的力学模型(B)。
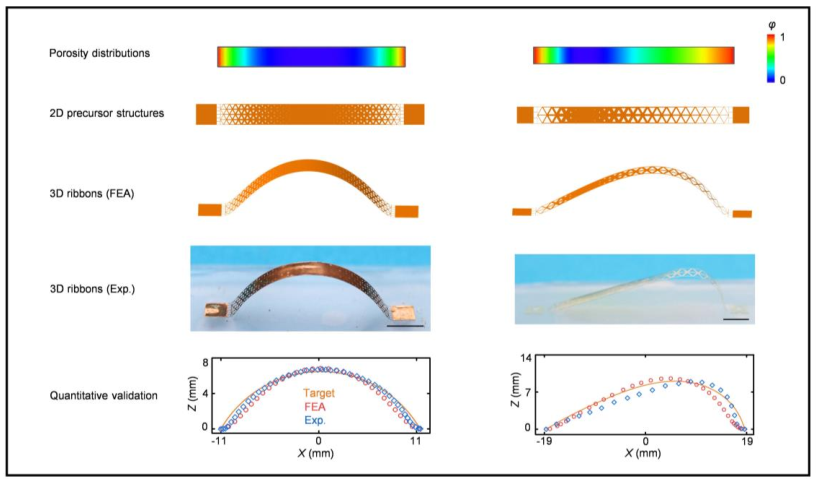
图 S15. 两种具有预定对称(左)和非对称(右)图案的简单三维丝带的逆向设计,其中测得的轴线与设计目标吻合良好。比例尺:5 mm。
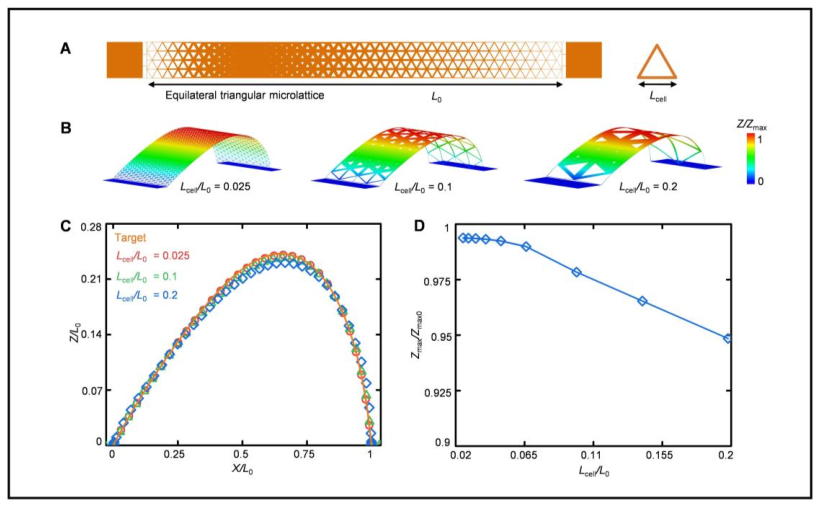
图 S16. 微晶格离散化单元尺寸对非对称丝带形状变形能力的影响。(A)具有等边三角形微晶格的非对称丝带的二维前驱体结构图示。 和 分别为三角形的弧长和边长。(B)三种不同单元尺寸的对称丝带的三维配置有限元分析结果。(C)(B)中三种丝带的母线坐标与目标曲线的比较。(D)非对称丝带的无量纲最大高度与无量纲单元尺寸的关系,其中 和 分别为逆向设计丝带和目标曲线的最大高度。随着无量纲单元尺寸的增加(例如,从 到 0.2),沿长度方向的晶格单元数量减少(例如,从 40 到 5),母线曲线逐渐偏离目标曲线(A ~ C)。但在仅有五个晶格单元的情况下(即 ),偏差非常小,这由无量纲最大高度的大小(~ 0.95)在(D)中得到证实。这些结果表明,对于单个丝带,形状变形能力并未随单元尺寸的增加(在 的范围内)发生明显变化。
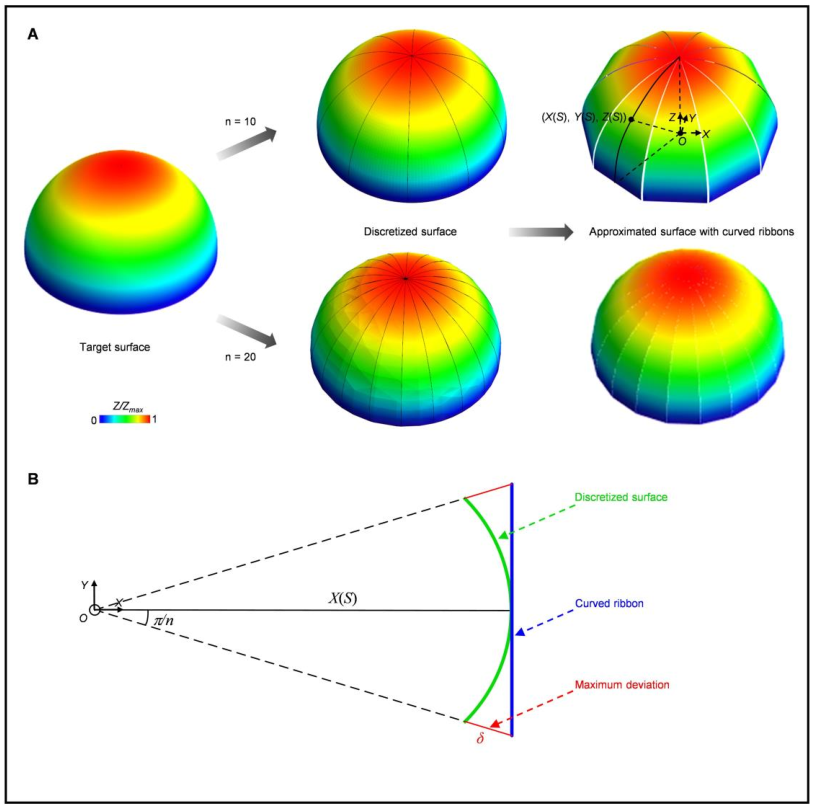
图 S17. 不同数量弯曲丝带的三维半球形介观表面的离散化示意图(A)以及该离散化策略引起的最大偏差(δ)(B)。
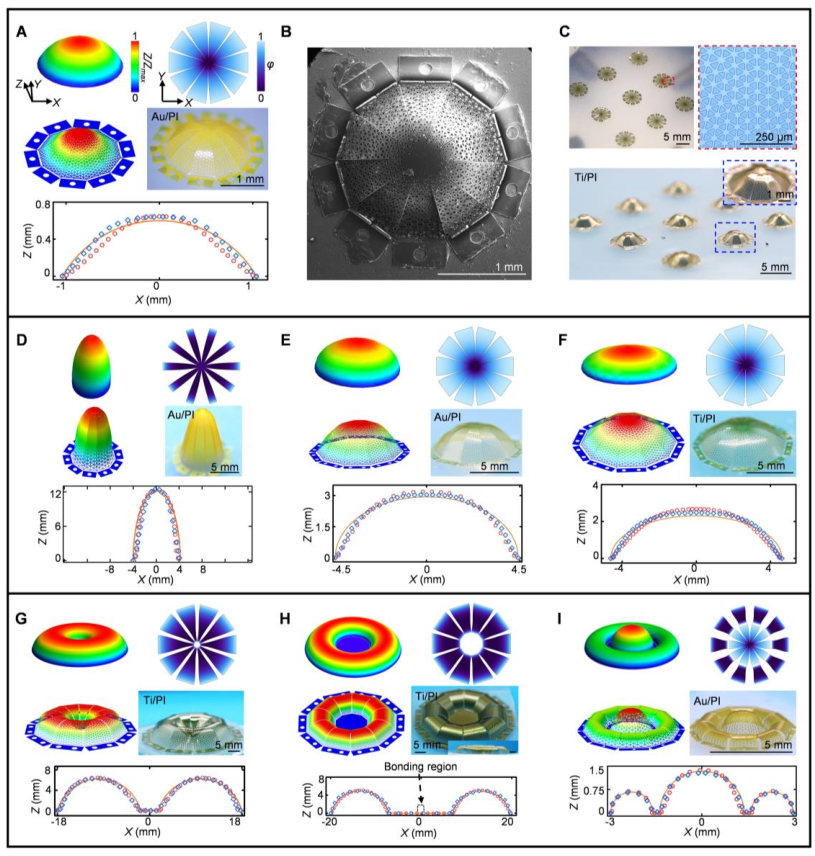
图 S18. 八种具有不同微晶格设计的介观表面的目标几何形状、孔隙率分布、有限元分析和实验结果以及坐标比较。(A)生成线中心角为120°的球冠形介观表面。(B)(A)中介观表面的SEM图像,其三维几何形状相当接近。(C)具有细化三角形晶格的球冠形介观表面阵列。(D~F)三种不同纵横比(分别为D中的3、E中的2/3和F中的1/3)的半椭球形介观表面。(G)具有内粘结位点的凹面介观表面。(H)具有内粘结位点的半环面介观表面。(I)宫殿状介观表面。
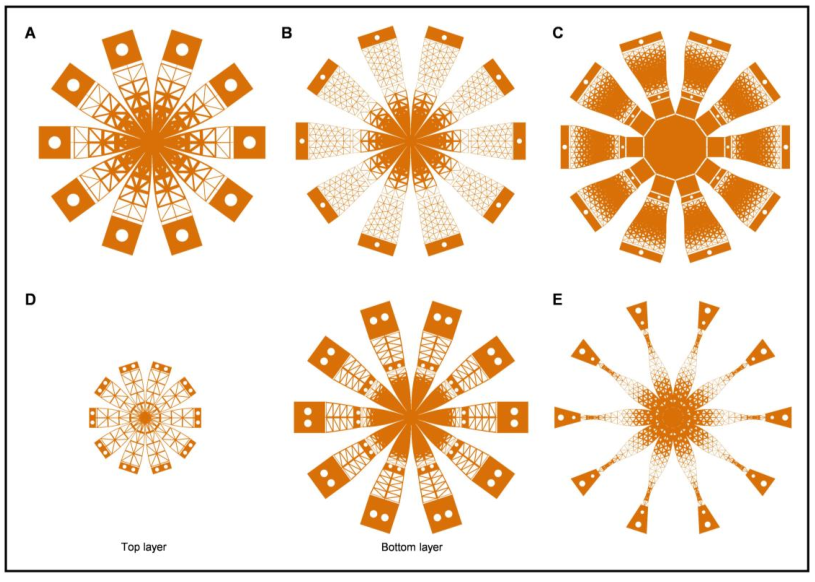
图 S19. 对应于图 2A~E 中所示三种介观表面的二维前驱体结构。特别地,基于(B)和(D)中二维前驱体结构制备的导电介观表面,其内径分别约为 1.4 mm(用于内半球形介观表面)和 1.25 mm(用于悬浮球形介观表面)。这两个相当接近的导电介观表面在集成刺激和传感组件后,可潜在用作胚胎细胞(例如,青蛙卵母细胞,直径约 1 mm)和类器官(例如,脑/膀胱类器官,直径约 1 mm)的生物电子界面。
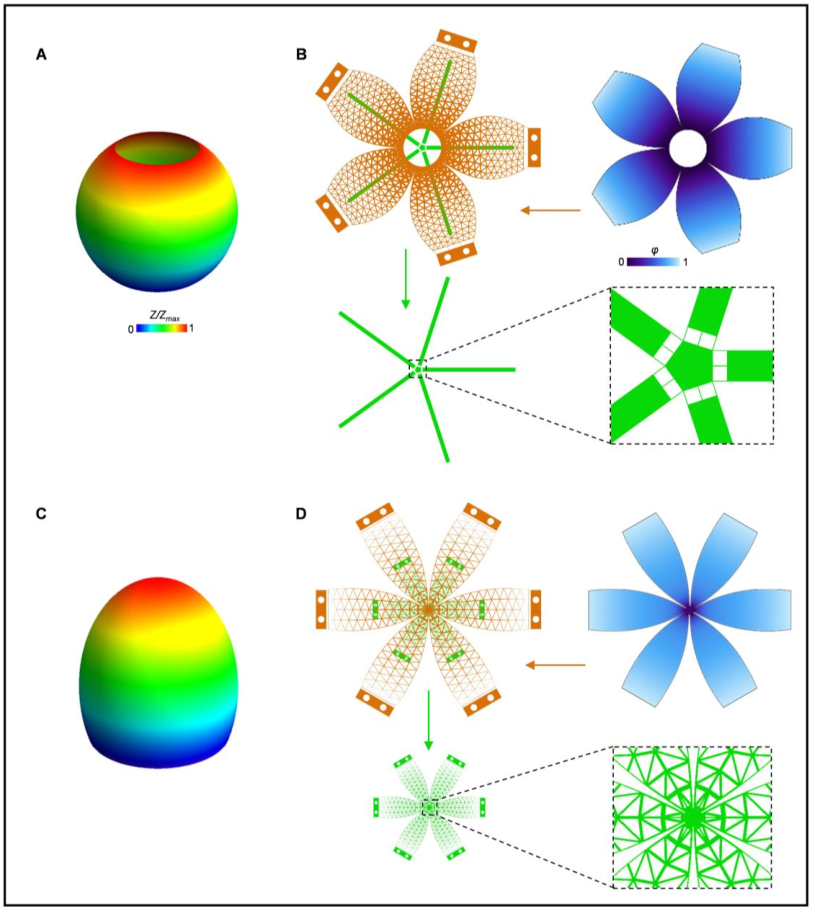
图 S20. 两种复杂仿生介观表面的逆向设计。(A、B)蓝莓花状介观表面的目标几何形状(A)、二维前驱体结构和孔隙率分布(B)。(C、D)“费城酸浆果”状介观表面的类似结果。
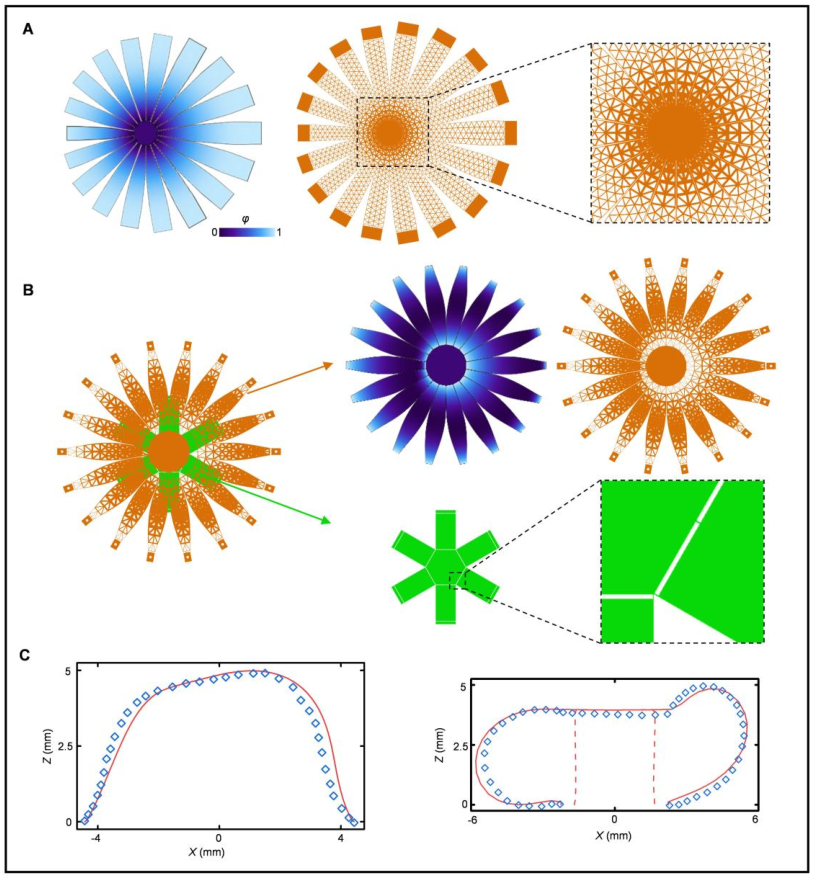
图 S21. 两个具有轻微不对称度的弯曲介观表面的逆向设计。(A)模仿园蛛腹部的三维介观表面的孔隙率分布及二维前驱体结构。园蛛腹部具有特殊的偏心几何形态,头部附近的侧面高于尾部附近。从顶部区域高斯曲率最小的点开始,目标腹部状介观表面被切割成18条丝带,每条丝带组件的孔隙率分布均经过优化,以实现闭合的不对称几何形态。(B)模仿不对称篮子的三维介观表面的类似结果。(C)这两种弯曲介观表面的有限元分析与实验结果的定量比较,显示出极好的一致性。
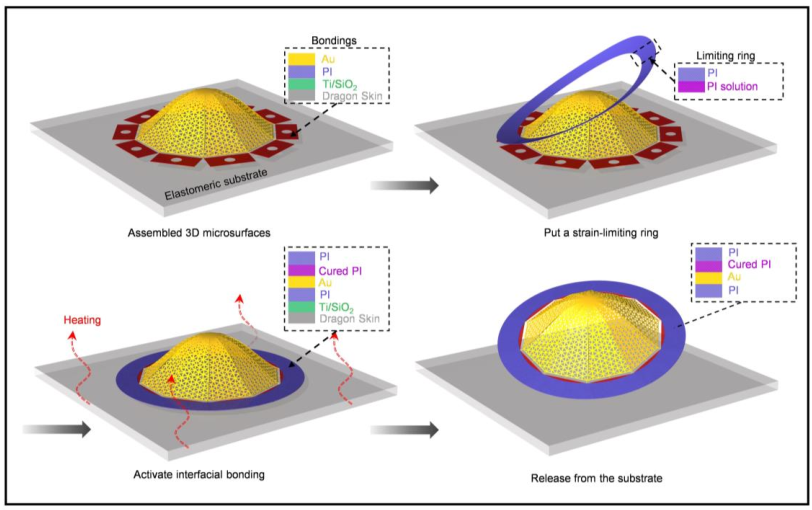
图 S22. 基于应变限制框架的隔离策略过程的示意图。
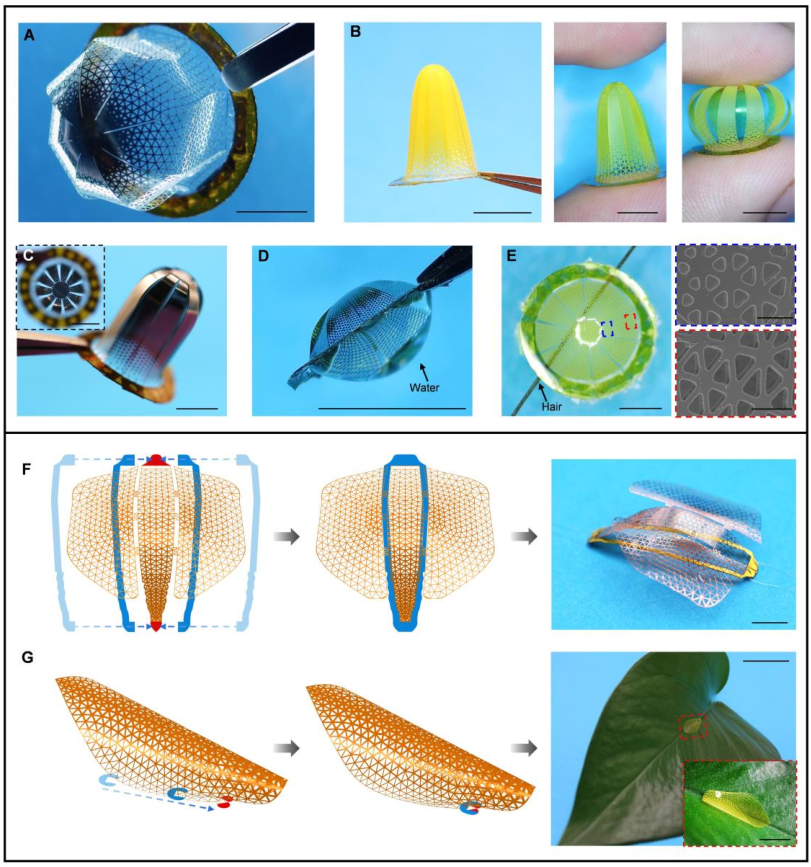
图 S23. 使用应变限制框架形成的各种自支撑介观表面。(A)一个类似章鱼头部的自支撑介观表面。(B)一个自支撑的半椭球形介观表面及其被两根手指压缩时的变形行为。(C)一个自支撑的圆柱形介观表面。(D)一个承载水滴的自支撑介观表面。(E)一个自支撑的球冠形介观表面(比例尺:1 mm)及其结构中微晶格的相应SEM图像(比例尺:100 μm)。(F)基于非圆形应变限制框架的类似黄蜂巢状介观表面的隔离过程示意图及相应的实验结果。(G)一个类似马蹄莲介观表面的类似结果,该介观表面从弹性基底上分离并转移到叶片表面。(A)~(D)、(F)和(G)中的比例尺:5 mm。
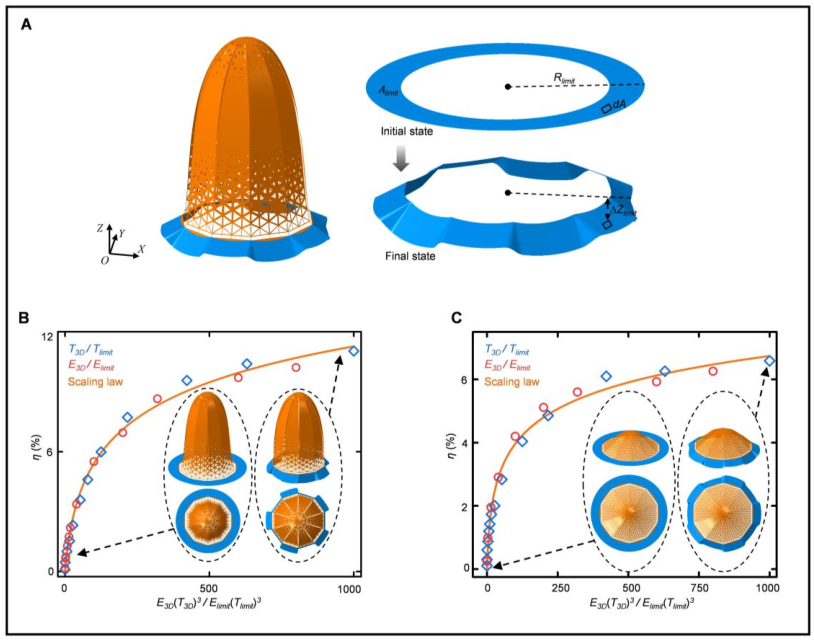
图 S24. 基于应变限制框架策略的自支撑三维介观表面翘曲比的缩放定律。(A)隔离过程后应变限制框架的变形。(B)半椭球形介观表面翘曲比()与弯曲刚度比()的分析模型(线)和有限元分析结果(点)。(C)基于有限元分析结果(点)的球冠形介观表面翘曲比的缩放定律(线)。
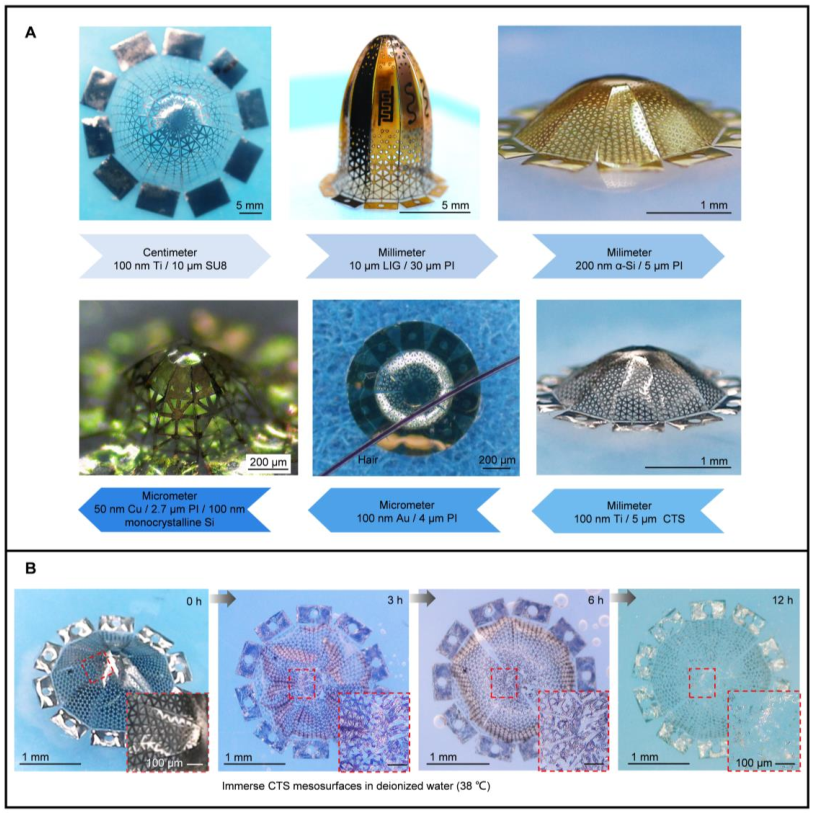
图 S25. 微晶格设计对多种材料体系的适用性。(A)在横向尺寸上,从几百微米到几厘米范围内,与功能材料(例如,单晶硅、非晶硅(a-Si)、金、钛、铜、激光诱导石墨烯(LIG)、壳聚糖(CTS)、PI 和 SU8)具有优异的兼容性演示。(B)将金属层从可溶胀壳聚糖介观表面(100 nm Ti / 5 μm CTS)浸入水中三小时后剥离,表明在瞬态电子器件中具有潜在应用。
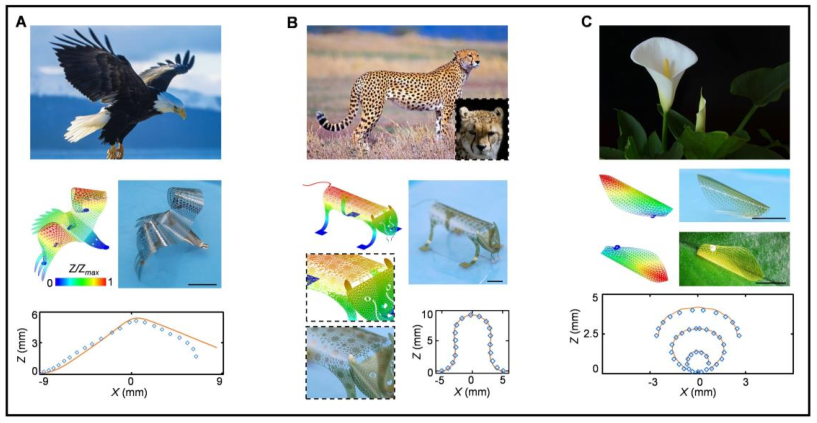
图 S26. 三种仿生介观表面的设计与制造。(A)鹰类介观表面的有限元分析(FEA)、实验结果及其定量比较(有限元分析:线,实验:点)。(B、C)猎豹类介观表面(B)和马蹄莲类介观表面(C)的类似结果。通过优化孔隙分布和三角形单元胞的尺寸,猎豹身体上的圆形斑纹可以被很好地复现。比例尺:5 mm。
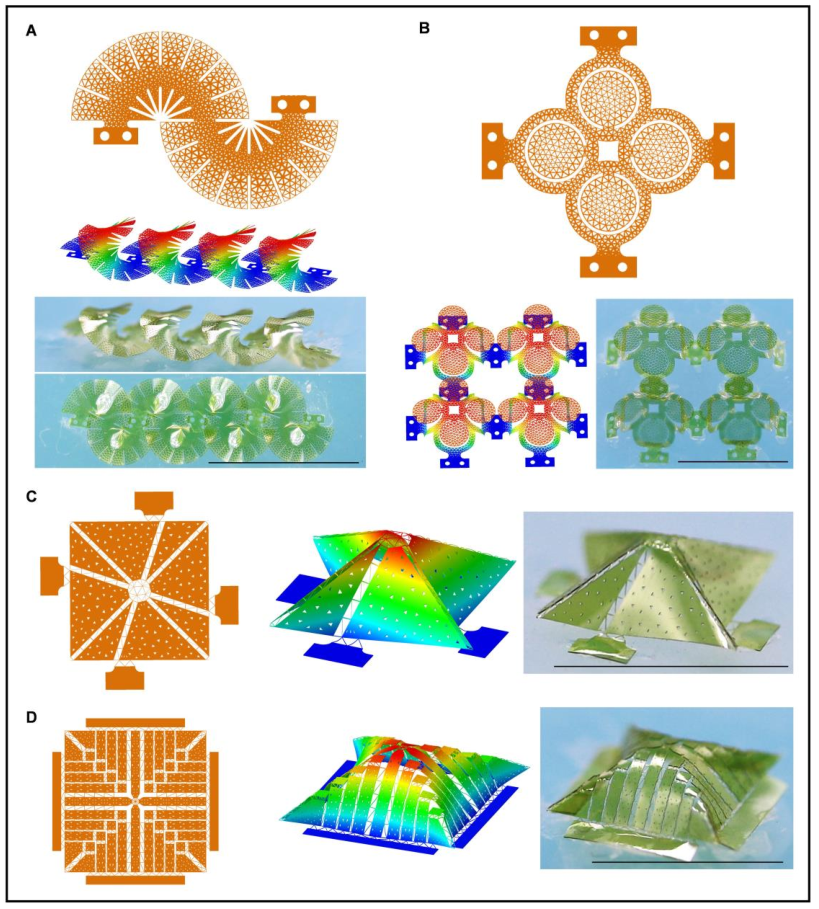
图 S27. 使用微晶格设计策略复现现有kirigami/origami三维介观结构。(A、B)两种具有不同微晶格设计的三维Kirigami介观结构的二维前驱体结构、有限元分析和实验结果。(C、D)两种三维Origami介观结构的类似结果。比例尺:5 mm。
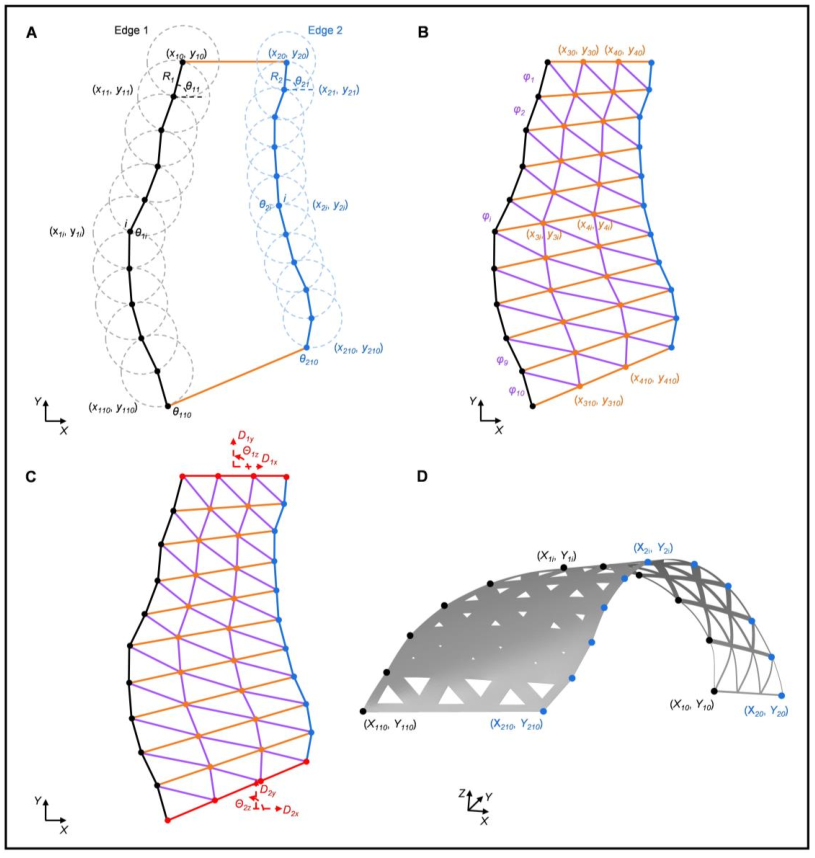
图 S28. 用三角形微晶格图案网格化二维带状前驱体结构。(A)二维前驱体结构两条边的离散化。(B)基于微晶格图案的二维前驱体结构网格化。(C)三维组装过程中施加到二维带状前驱体上的载荷。(D)根据规定的几何形状和加载条件,由二维前驱体结构组装而成的两条三维弯曲带上的22个特征点的坐标。
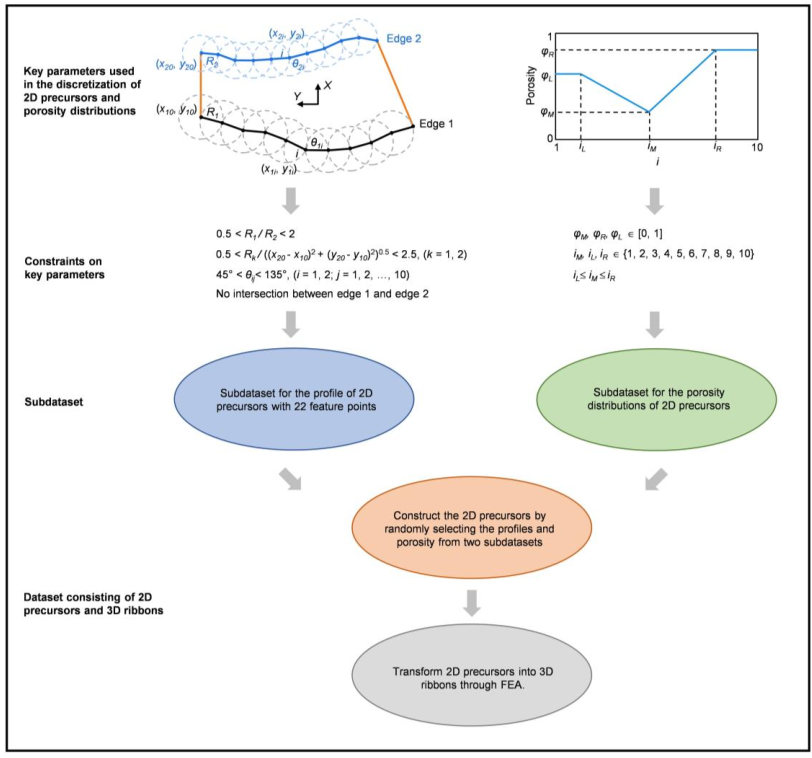
图 S29. 构建二维前驱体(特征点的平面坐标和孔隙率分布)及对应三维带状结构(特征点的空间坐标)数据集的流程。
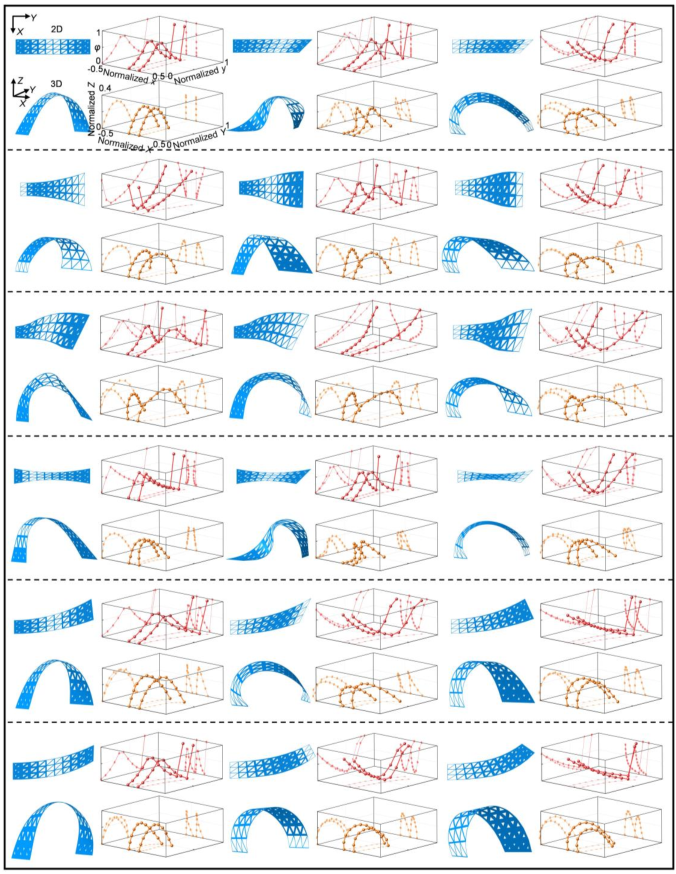
图 S30. 从构建的数据集中选取的十八个示例。
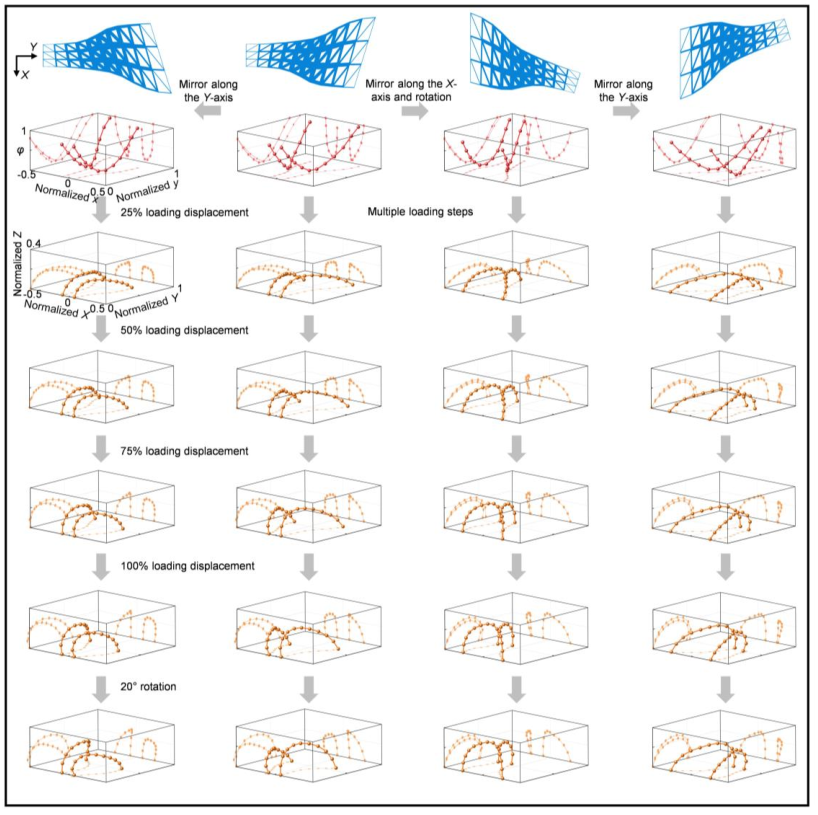
图 S31. 基于几何镜像/旋转的数据增强及不同加载步长的扩展。每个二维前驱体的设计可通过旋转和镜像生成四个不同的前驱体,从而在多个加载步长(例如,5个加载位移)下给出三维构型,由此得到20个不同的数据点。
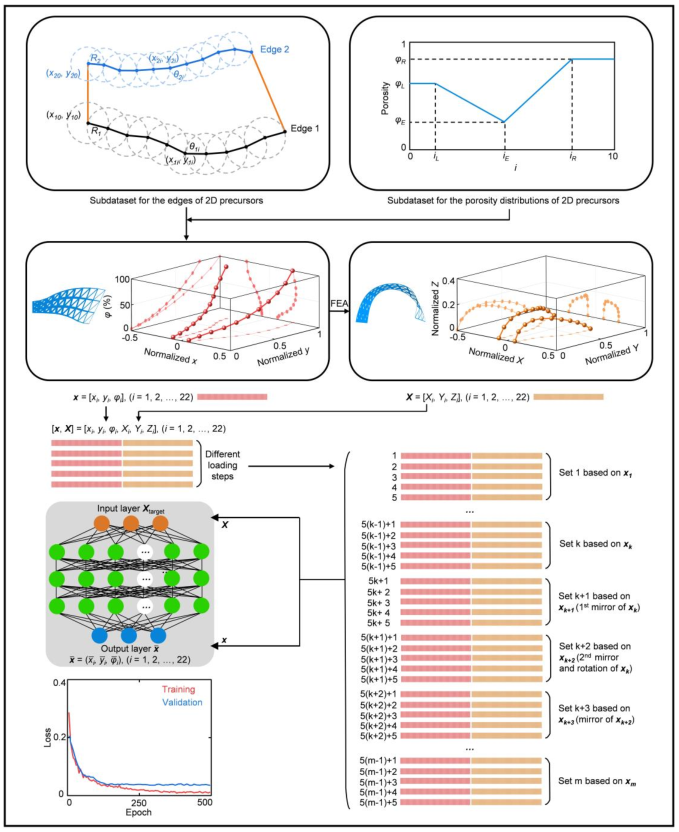
图 S32. 基于点云方法的数据结构化与模型训练。
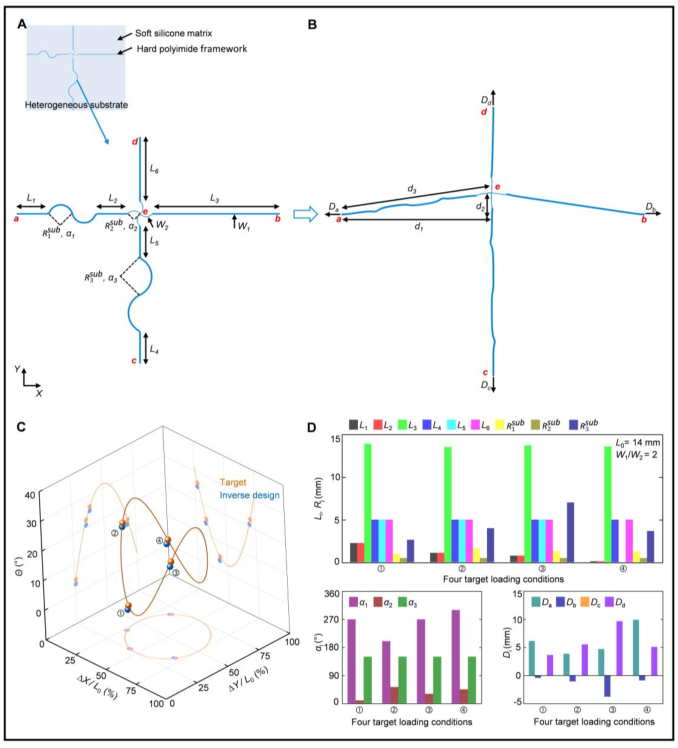
图 S33. 嵌入软弹性体矩阵中的 PI 框架的异质基底逆设计。(A, B) 嵌入弹性体矩阵(A)中的 PI 框架的几何模型,该矩阵由六条直带和四对弧形带(B)组成。(C, D) 四种加载条件下(在(C)中标记为①、②、③和④)PI 框架关键几何参数(D)的逆设计,其中 ΔX、ΔY 和 θ 表示点“e”相对于点“a”在 X 和 Y 方向上的相对位移以及旋转角度(在 XY 平面内)。
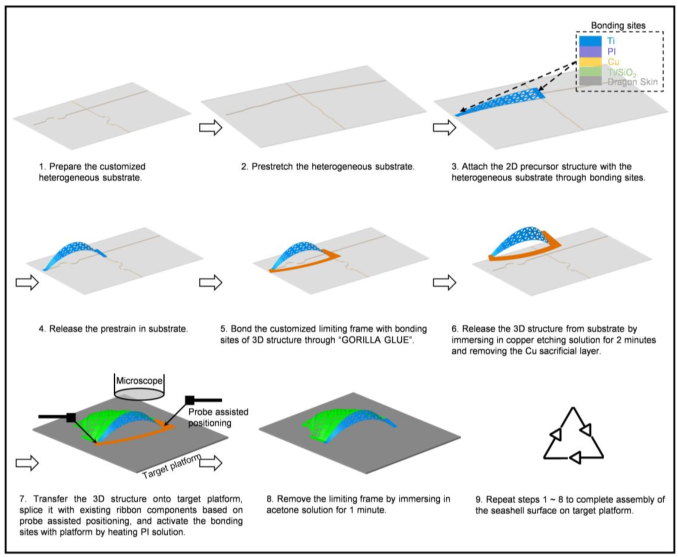
图 S34. 借助异质基底、应变限制框架和探针定位系统组装类贝壳状介观表面的过程示意图。
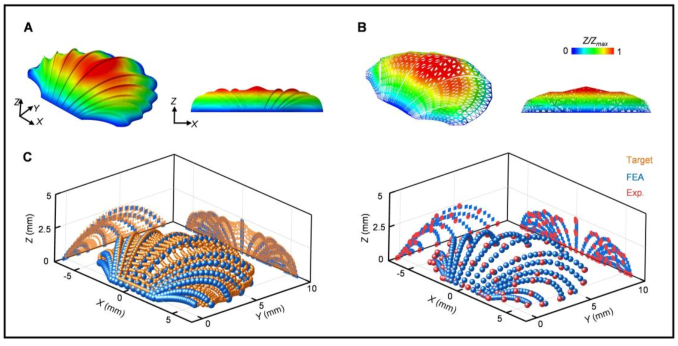
图 S35. 逆向设计的类贝壳状介观曲面的有限元分析与实验结果。(A) 目标几何形状。(B) 组装后的类贝壳状介观曲面的计算三维构型。(C) 目标点云与有限元分析及实验测量所得点云之间的定量比较。
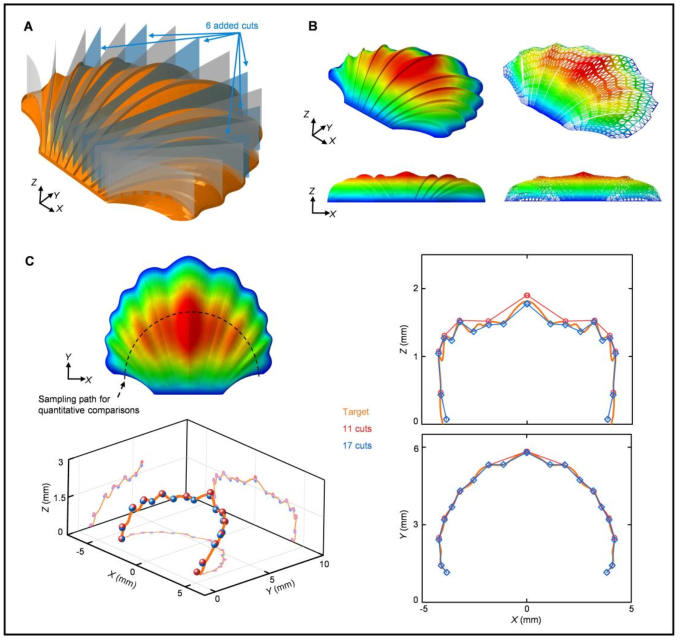
图 S36. 具有比图 3A 中更精细切割的类贝壳状介观曲面的逆向设计。(A) 比图 3A 中多 6 条切割的类贝壳介观曲面的离散化示意图。(B) 目标几何形状(左)和基于类贝壳状介观曲面有限元分析的计算三维构型(右)。(C) 沿采样路径的目标点与具有 11 条切割和 17 条切割的逆向设计介观曲面的点的坐标比较。
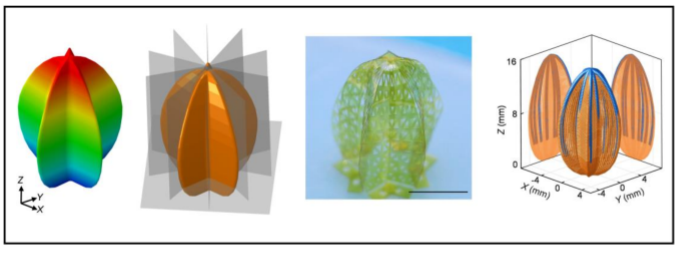
图 S37. 类杨桃状介观曲面的目标几何形状、离散化策略、实验结果,以及计算点云(蓝色)与设计目标(橙色)的比较。该介观曲面通过一组穿过中心线的平面被划分为离散化的带状组件。
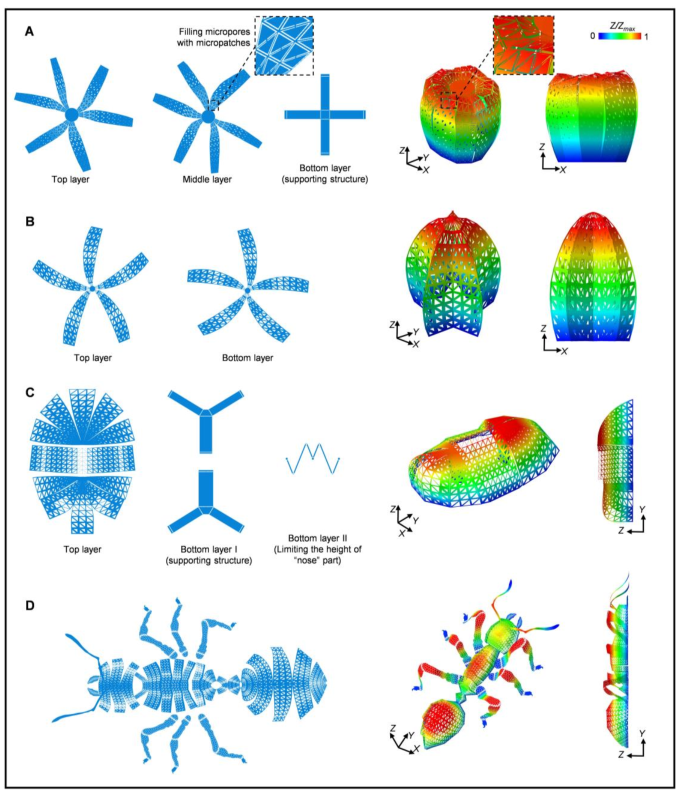
图 S38. 四个高度复杂介观曲面的二维前驱体(左)和有限元分析结果(右),包括形似墨西哥辣椒(A)、杨桃(B)、口罩(C)和蚂蚁(D)的介观曲面。在(A)和(C)中采用支撑结构,通过折纸变形形成柱状介观曲面,从而限制顶层带的变形。值得注意的是,基于微晶格设计策略的仿生介观曲面能够很好地再现微小的局部几何特征,包括墨西哥辣椒(A)的波浪形顶部和杨桃(B)的弯曲褶皱。
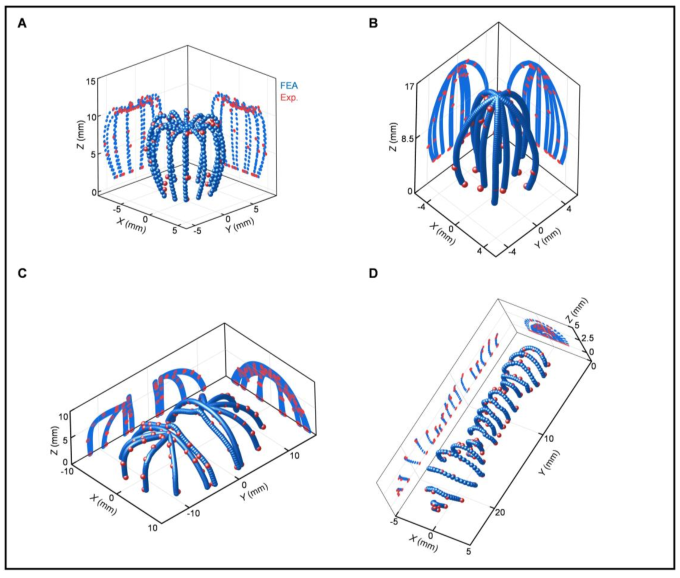
图 S39. 对分别显示在图 4B、图 S37、图 4C 和图 D 中的四个介观曲面的有限元分析和实验结果的切割边缘点云的定量比较。
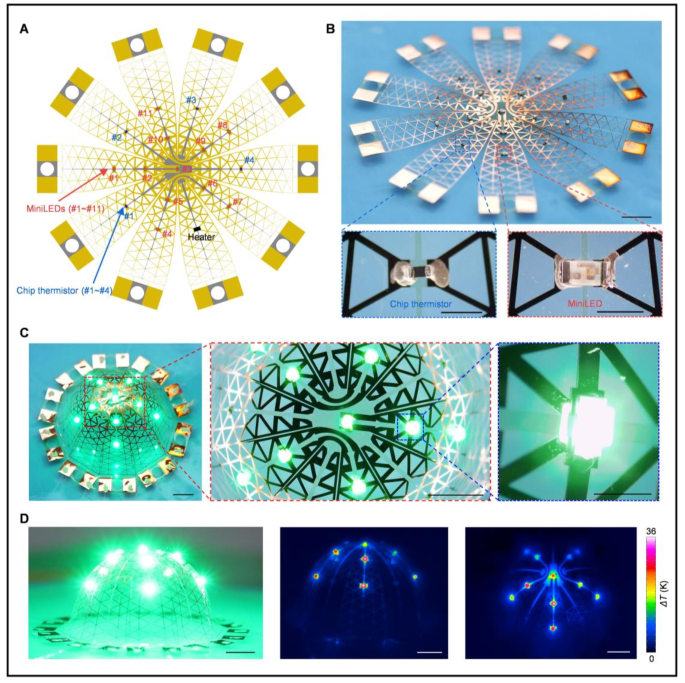
图 S40. 半球形电子设备的设计与组装。(A, B) 集成 11 个 miniLED、4 个芯片热敏电阻和一个电阻加热器的二维前驱体结构的示意图和光学图像。(C) 组装后的半球形设备的光学图像,其中包含一排发光的 miniLED,以及中央区域(中间)和单个 miniLED(右侧)的放大视图。(D) LED 阵列点亮十分钟后三维半球形电子设备的光学图像(左)和红外图像(中、右)。比例尺:单个芯片热敏电阻或 miniLED 的放大图像中为 1 mm,其他图像中为 5 mm。
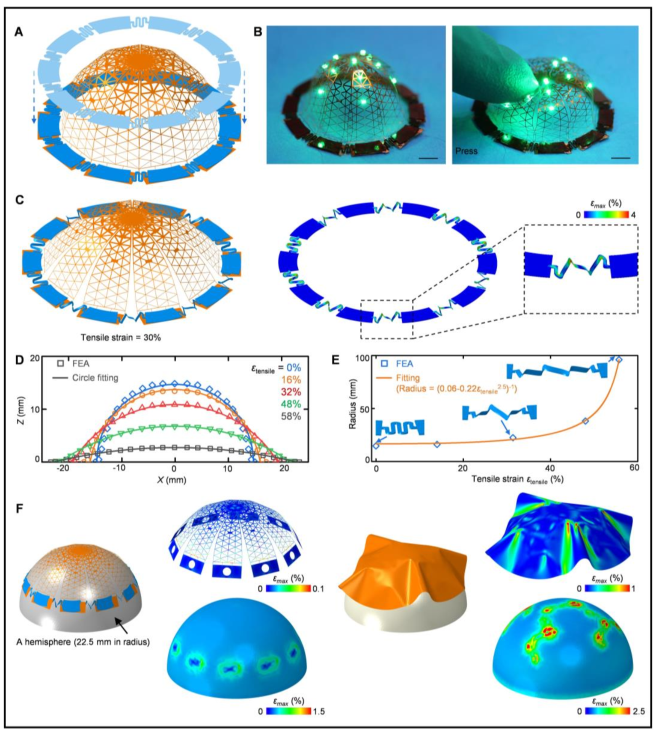
图 S41. 采用应变限制框架中优化的蛇形结构实现半球形电子设备的隔离。(A) 由 10 个蛇形结构和 10 个分段弧组成的应变限制框架,附着有组装电子设备的粘接位点。(B) 设备自由状态下带有点亮 miniLED 的光学图像(左),以及被手指压缩后的变形状态(右)。(C) 施加 30% 拉伸应变后设备的变形构型,以及应变限制框架上最大主应变的分布情况。(D, E) 随着拉伸应变增加,该设备的母线半径和曲率半径的演变。该设备的曲率半径可大幅调节(> 6 倍),以实现与猪心脏顶端的保形接触,从而获得高信噪比的传感温度(图 4C)。(F) 将电子设备与半球上的实心圆形膜进行包裹的有限元分析结果。采用微晶格设计的设备可与目标半球保形接触,而实心膜则会发生不期望的折叠变形,伴随显著的局部应变集中。比例尺:5 mm。
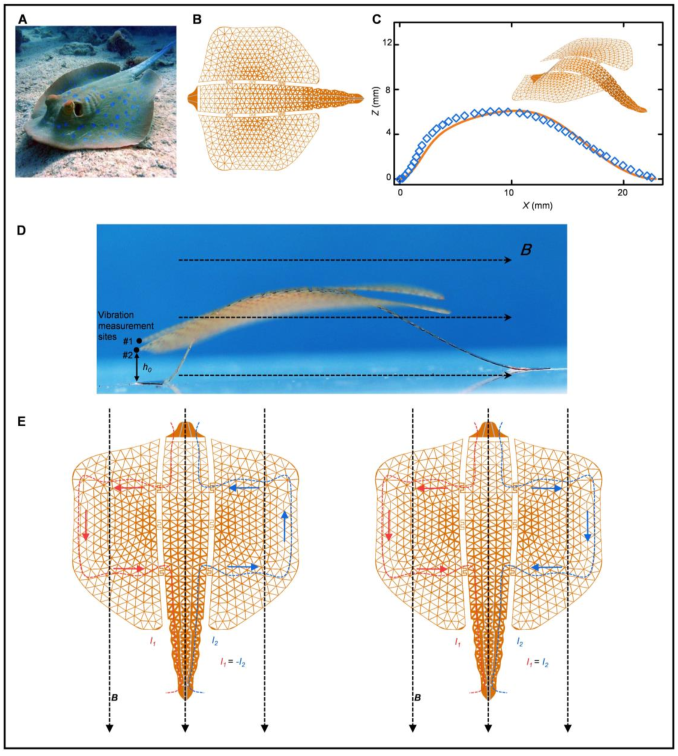
图 S42. 魟鱼状三维致动器的设计。(A) 魟鱼的光学图像。(B) 二维前驱体结构的设计,其中一对“扇形鳍”通过六条柔性蛇形带与主体连接。(C) 计算的三维构型,以及沿主体中心线的有限元分析和实验结果的坐标比较。(D, E) 磁场 的方向 (D) 和对应于图 4E 所示的两种不同振动模式的两种不同电流类型 (E) 的图示。当电流方向相反时,介观结构经历上下振动模式,两个“鳍”同相同步摆动;否则,介观结构经历左右振动模式,鳍反相反向摆动。
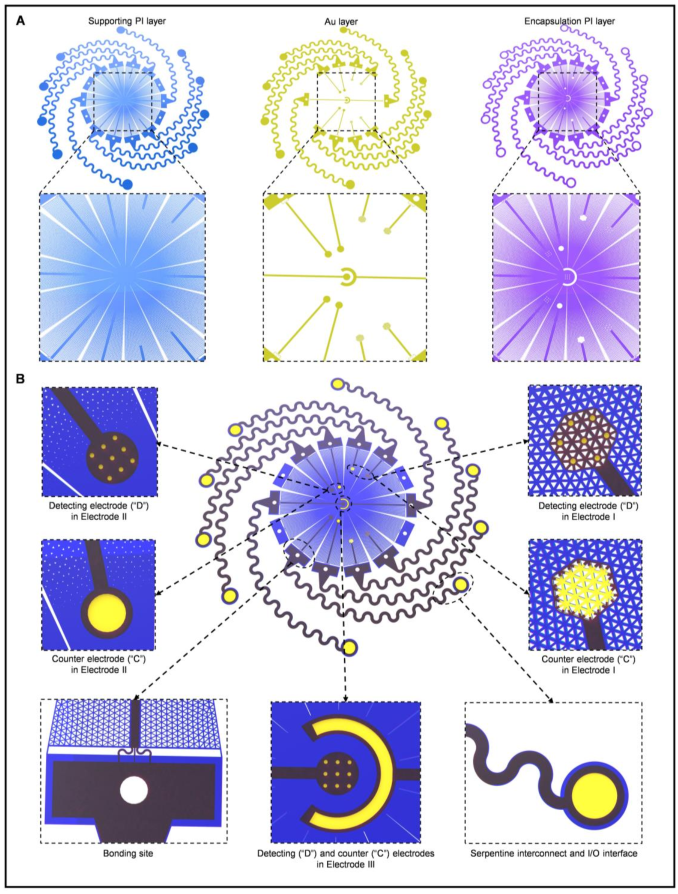
图 S43. 用于三维电子支架的二维前驱体设计。(A) 二维前驱体中三层功能层的示意图,包括底部支撑层(PI)、中间层(Au)和顶部封装层(PI)。(B) 二维前驱体中关键几何特征的示意图,包括三种电极的布局、键合位点和蛇形互连。
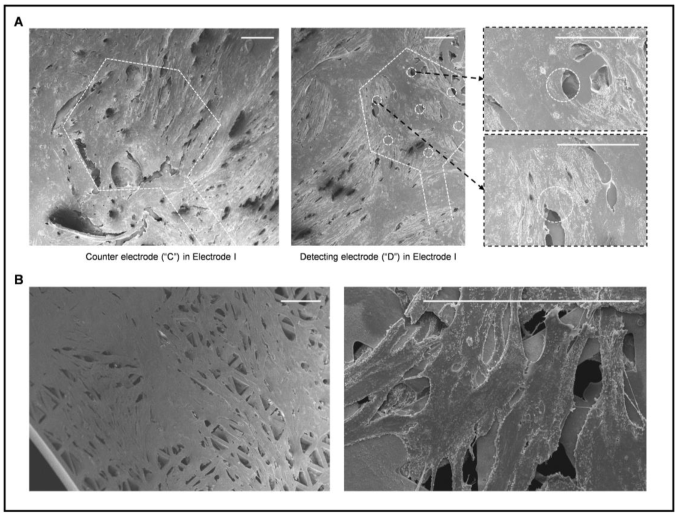
图 S44. 电极 I(A)和外微晶格区域(B)的扫描电子显微镜图像,以及 RPE 细胞层详细特征的放大视图。比例尺:100 μm。
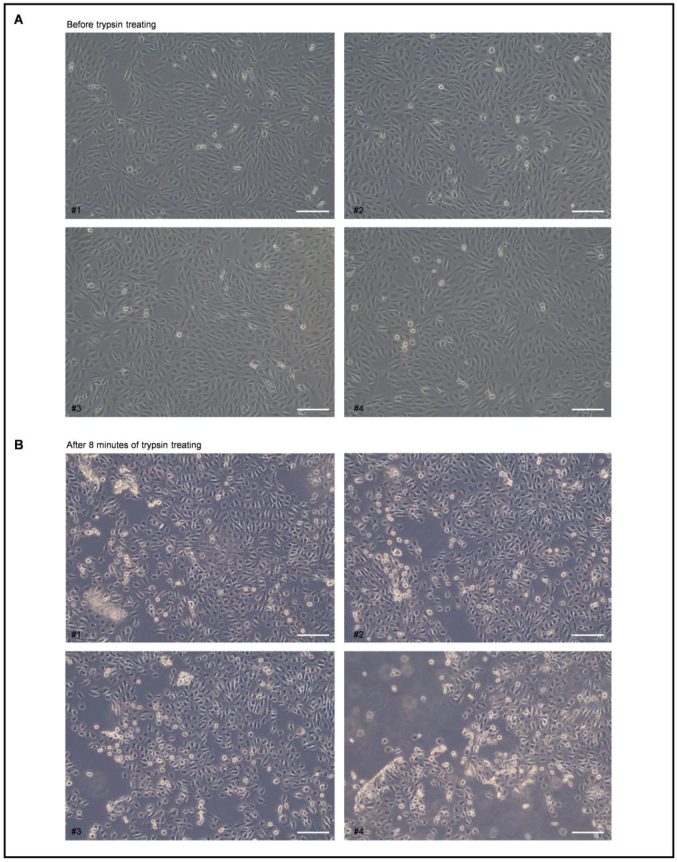
图 S45. RPE 细胞在胰蛋白酶处理前(A)和处理后(B)的光学图像。比例尺:20 μm。
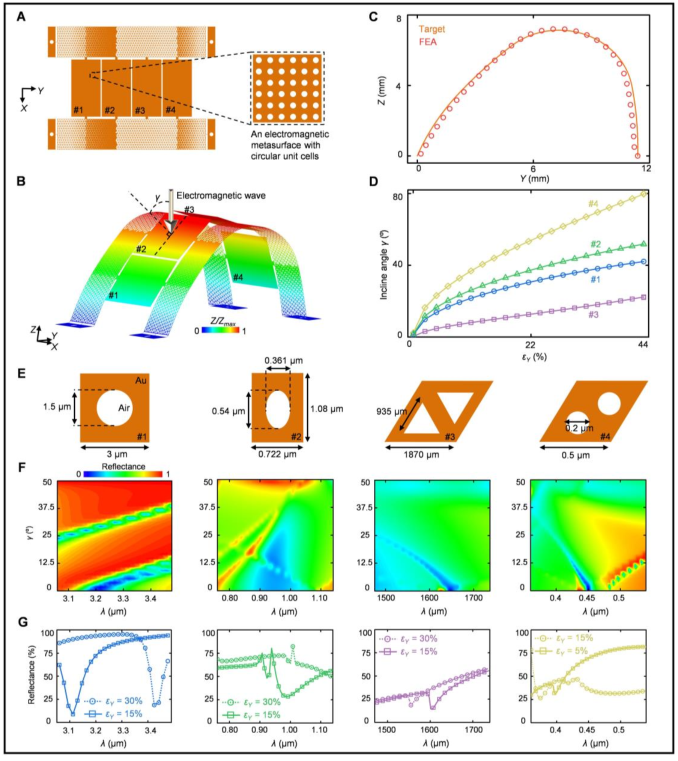
图 S46. 微晶格设计实现了单个设备上四种不同超表面的差异化且可调节的空间取向。(A) 由两条相同的微晶格设计支撑带连接的四种不同超表面的二维前驱体。(B) 在单个芯片上组装的四种不同电磁超表面的三维结构,具有四个不同的倾斜角(即,面板 #1 ~ #4 分别为 40°、50°、20° 和 80°,压缩应变为 43%)。(C) 有限元分析结果与组装支撑带的靶标几何形状的对比。(D) 四种表面的倾角 (γ) 与压缩应变 (ε_y) 的关系。(E) 四种超表面上微图案的形状和尺寸。(F) 四种不同超表面在其相关波长范围内的反射率(等高线图)(即,面板 #1 ~ #4 分别为太赫兹光波、红外光波、微波和可见光波)。(G) 通过改变其在敏感频带处的压缩应变来调节四种不同超表面的反射率。
Movie S1. 微晶格设计与半球形微表面的组装。四个二维微晶格结构(~200 nm Si / ~8 μm PI)的孔隙率分布通过所提出的逆向设计方法获得,这些结构通过可控压缩屈曲转化为半球形微表面的阵列。微结构归一化最大高度随压应变增加而增加。
Movie S2. 微晶格设计与火山状微表面的组装。四个二维微晶格结构(~100 nm Ti / ~8 μm PI)的孔隙率分布通过所提出的逆向设计方法获得,这些结构转化为火山状微表面的阵列。微结构归一化最大高度随压应变增加而增加。
Movie S3. 微晶格设计与宫殿状微表面的组装。两个二维微晶格结构(~100 nm Ti / ~8 μm PI)的孔隙率分布通过所提出的逆向设计方法获得,这些结构转化为宫殿状微表面,每个微表面由外区的环面和内区的圆柱组成。微结构归一化最大高度随压应变增加而增加。
Movie S4. 3D透气、贴合电子设备的机械鲁棒性。该电子设备由11个蓝色miniLED、4个芯片热敏电阻、1个加热器和1个应变限制框架组成,这有助于设备隔离和非球面贴合。该电子设备在承受面内拉伸、面内压缩和面外压缩时表现出优异的机械鲁棒性。
Movie S5. 黄貂鱼启发的由洛伦兹力激发的3D双模致动器。两个集成“扇形鳍”的电路可在沿体长方向的固定磁场下,对3D微结构产生周期性变化的洛伦兹力。当电流方向相反时,微结构经历上下振动模式,两个“鳍”同相拍动;否则,微结构经历左右振动模式,拍动反相。